Home > Gestion des appareils > Paramètres de l’appareil
Collision Avoidance Sensing (CAS)
En savoir plus sur la façon de configurer Collision Avoidance Sensing pour votre drone dans le tableau de bord FlytBase.
- Collision Avoidance Sensing permet à votre drone de détecter des obstacles en temps réel.
- Pour configurer cette fonctionnalité pour votre drone, accédez à l’application DJI Pilot 2, où vous pouvez activer/désactiver la fonctionnalité « Obstacle Avoidance » et définir les distances de freinage et d’avertissement pour votre drone. Le drone respectera les paramètres de la RC et s’arrêtera automatiquement lorsqu’un obstacle est détecté à l’intérieur de sa distance de freinage.
- Votre drone possède deux types de systèmes de détection : le système de vision et le système de détection infrarouge. Ces systèmes fonctionnent ensemble, permettant au drone de détecter des objets et de s’arrêter à une distance de freinage définie.
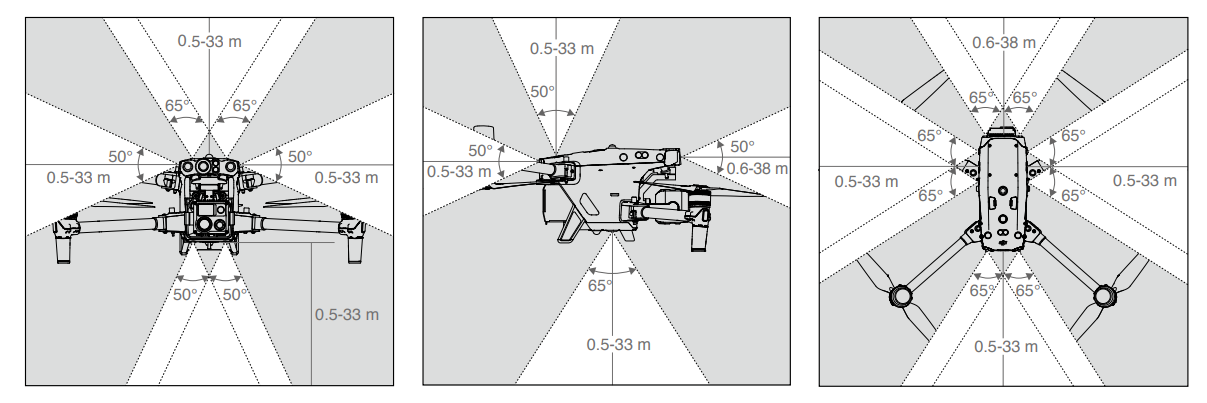
Plage de détection du système de vision (Source : DJI)
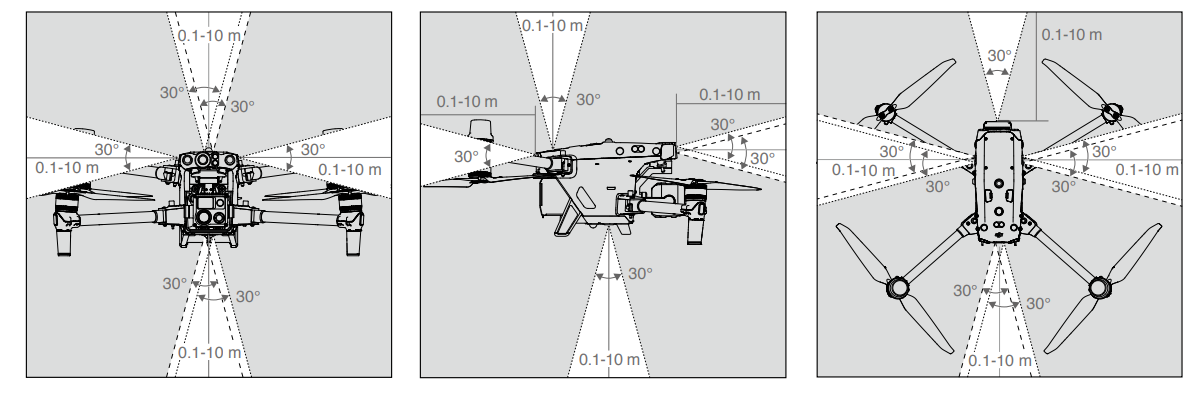
Plage de détection du système de capteurs infrarouges (Source : DJI)
Pour plus de détails sur le comportement de Obstacle Sensing, consultez le DJI User Manual, en particulier les pages 39 à 47.
Configurer Collision Avoidance Sensing pour votre drone
Configurer la détection d'évitement des collisions (CAS) pour votre drone
- Assurez-vous que votre drone est sous tension (« ON »).
- Accédez à l’application DJI Pilot 2 sur votre RC Plus et associez (bind) le drone. (Assurez-vous que RC Plus est sélectionnée comme « Controller B »)
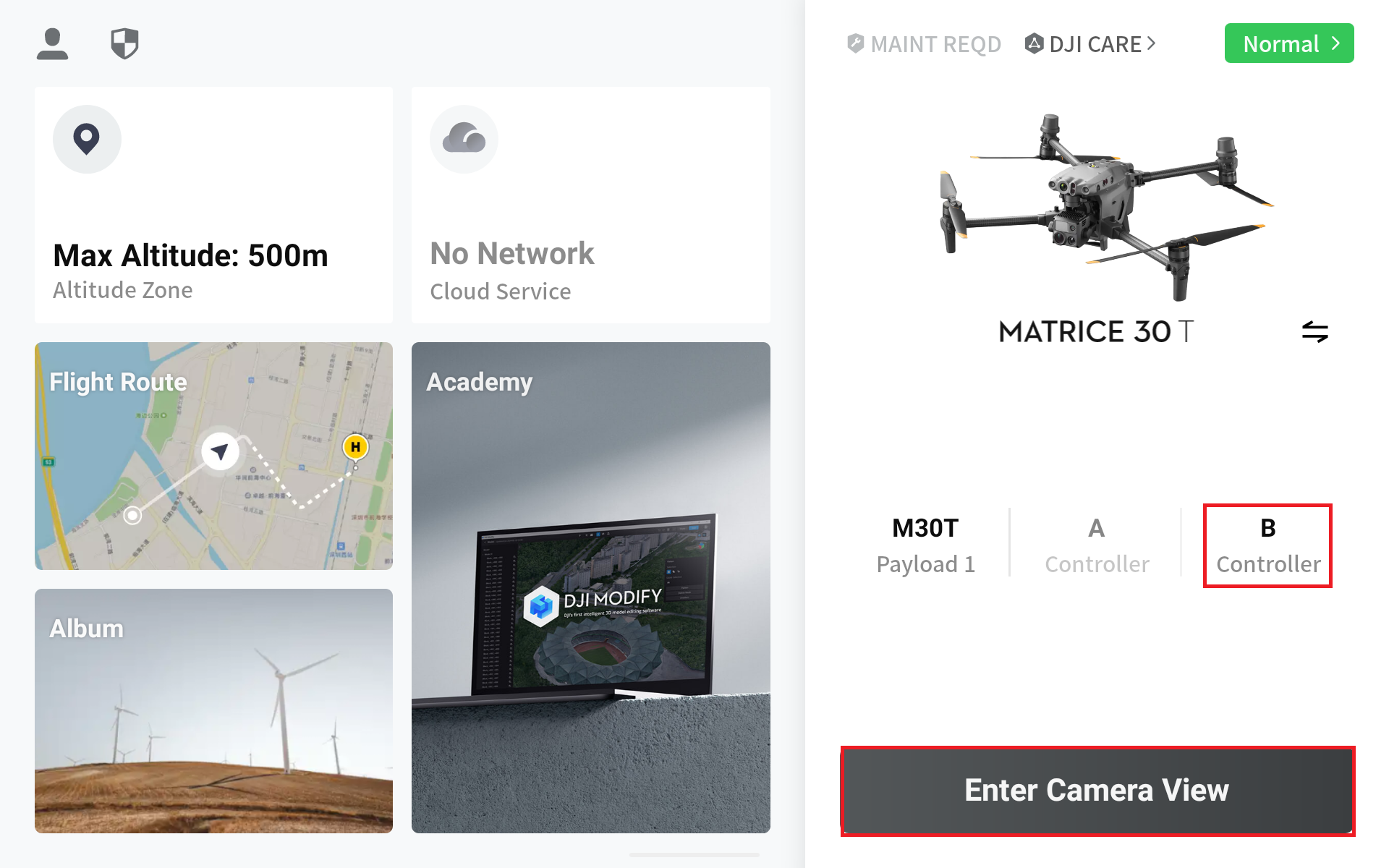
Configurer la RC Plus comme « Contrôleur B »
- Cliquez sur le bouton « Enter Camera View ».
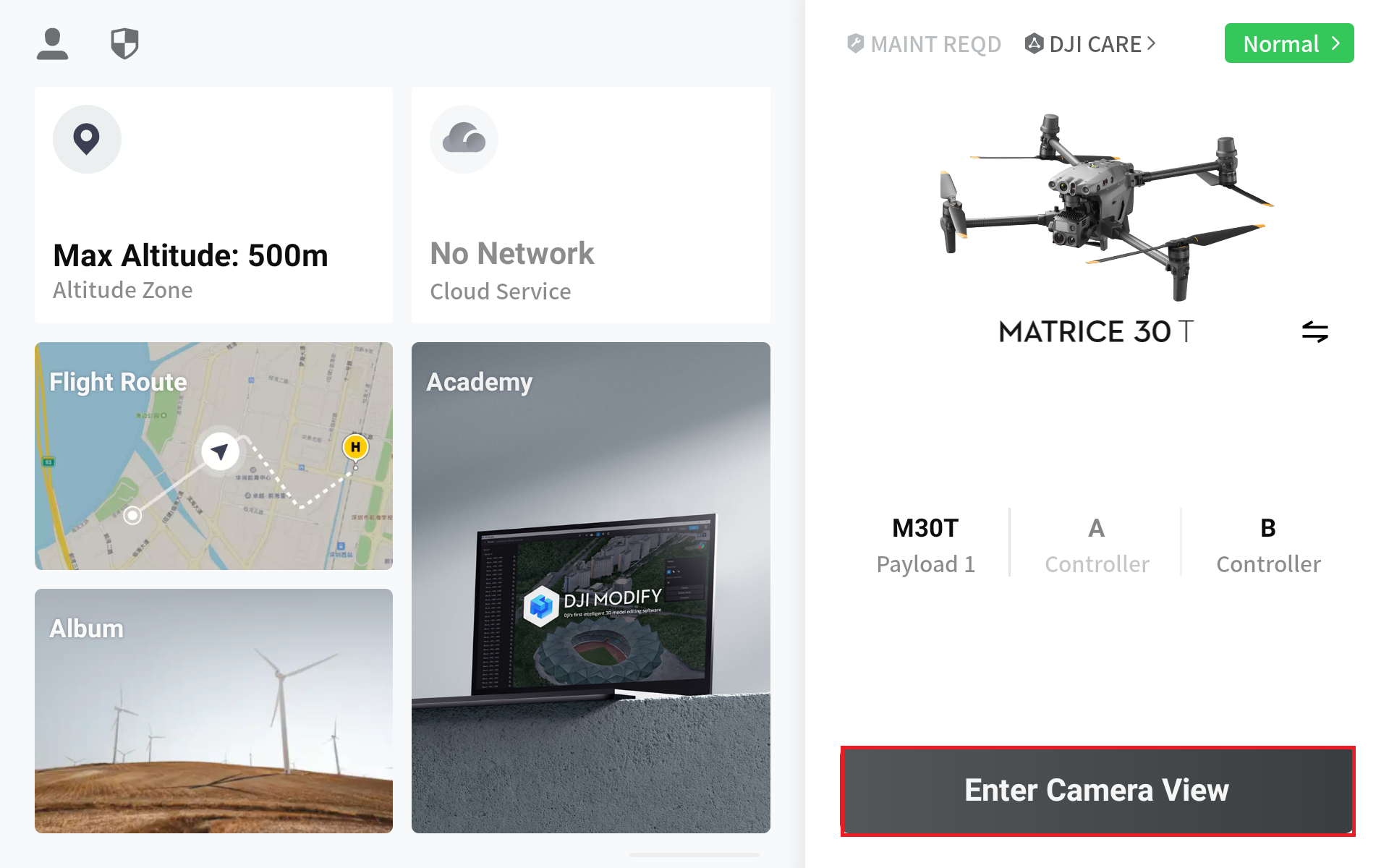
Fenêtre de l'application DJI Pilot 2
- Accédez à « Obstacle sensing settings » en cliquant sur le bouton de paramètres.
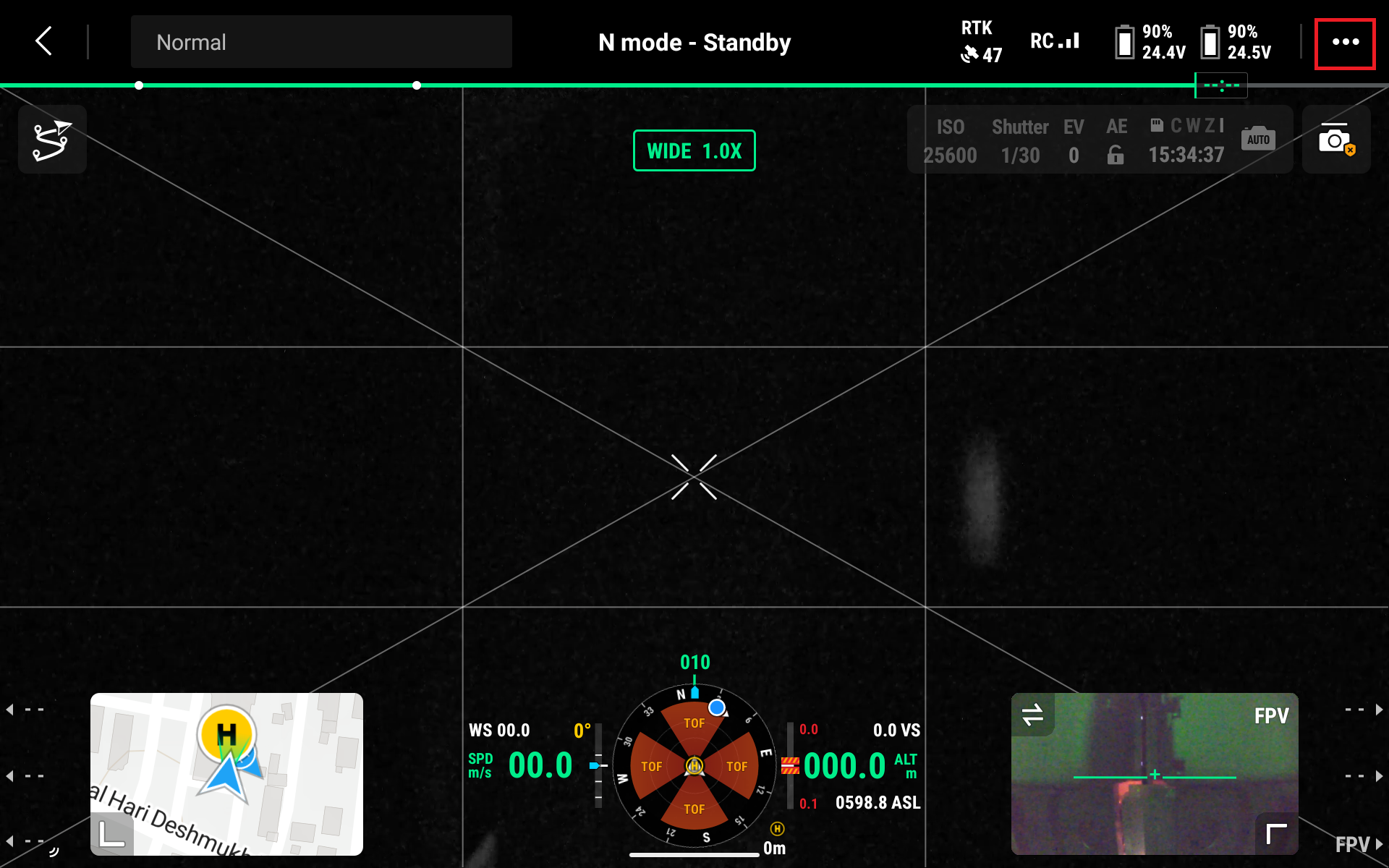
Navigating to "Obstacle Sensing Settings"
- Assurez-vous que le bouton à bascule Obstacle Avoidance est réglé sur « Brake », ce qui indique que la fonctionnalité d’évitement d’obstacles est activée (« ON »).
- Configurez « Braking Distance » et « Warning Distance » pour les capteurs d’évitement d’obstacles Horizontal, Vertical et Downward.
La distance d’avertissement (warning distance) doit être supérieure à la distance de freinage (braking distance).
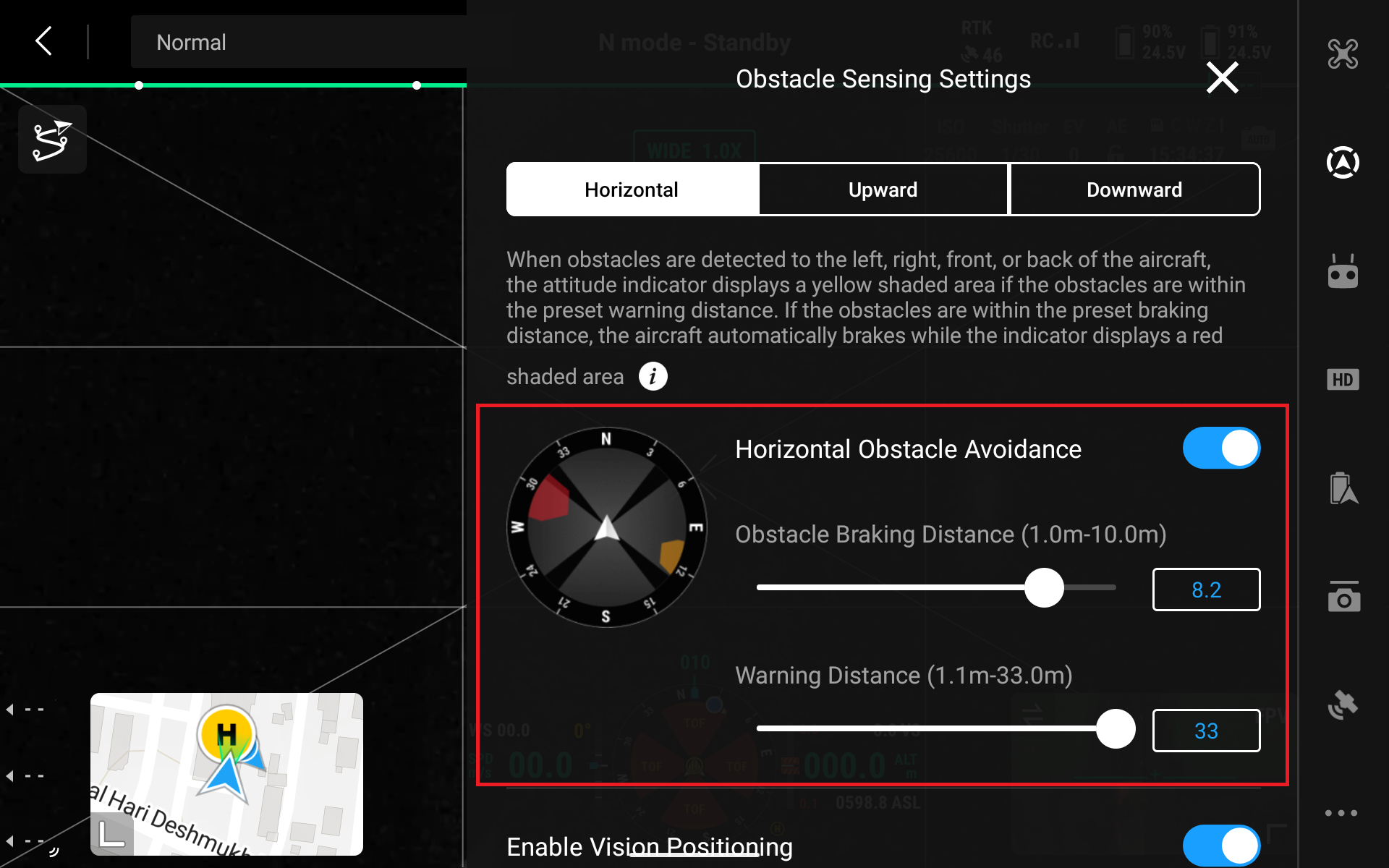
Configurer les distances de freinage et d'avertissement
Accéder à Collision Avoidance Sensing (CAS) dans le tableau de bord FlytBase
- Accédez à l’onglet « Device Management ».
- Sélectionnez l’appareil que vous souhaitez configurer.
- Allez à « Device Settings ».
- Sous cette section, vous pouvez voir les informations liées à Collision Avoidance Sensing (CAS) dans le tableau de bord FlytBase.
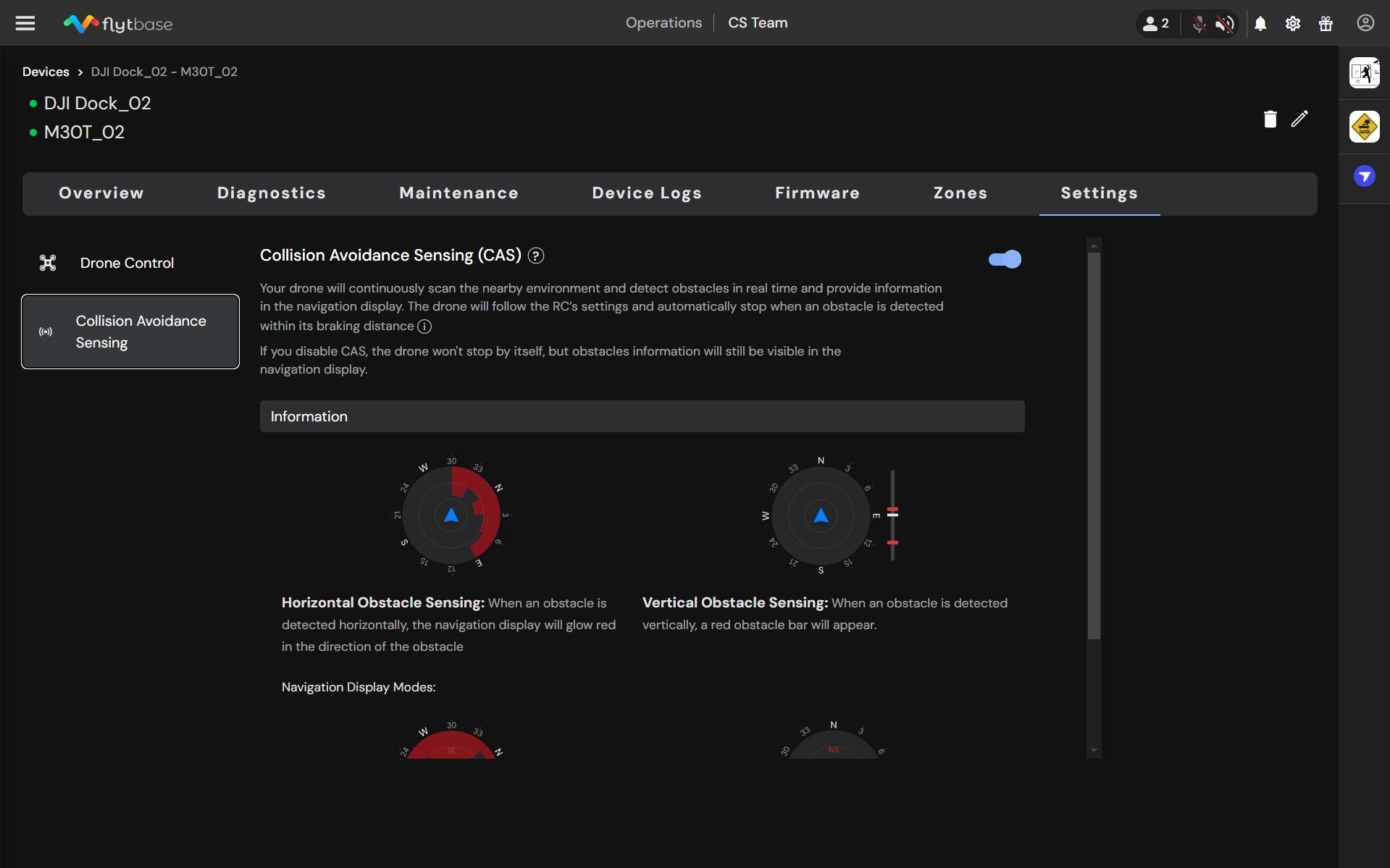
Informations CAS et bouton d'activation
- Lors de l’utilisation des commandes manuelles (manual controls), vous pourrez voir l’affichage de navigation indiquant les obstacles à proximité autour du drone.
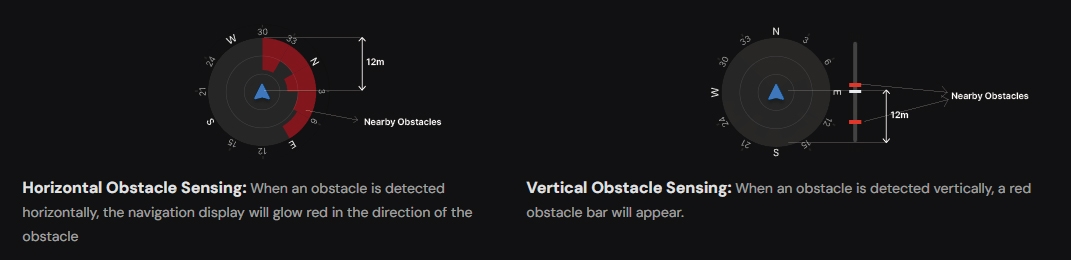
Navigation display showing nearby obstacles
Comportement attendu
| Scénario | Description | Comportement |
|---|---|---|
| Le drone effectue une mission autonome. | Il détecte un obstacle sur son trajet. | Le drone s’arrête à la distance de freinage configurée et reste en vol stationnaire. Vous pouvez prendre le contrôle manuel pour contourner l’obstacle ou effectuer un RTH. |
| Le drone effectue un RTH. | Il détecte un obstacle sur son trajet. | Le drone s’arrête à la distance de freinage configurée et reste en vol stationnaire. Vous pouvez prendre le contrôle manuel pour éloigner l’appareil. |
| Le drone effectue une mission manuelle. | Il détecte un obstacle sur son trajet. | Vous pourrez voir les obstacles à proximité dans l’affichage de navigation. Le drone s’arrête à la distance de freinage configurée et reste en vol stationnaire. Vous pouvez ensuite effectuer un RTH. |
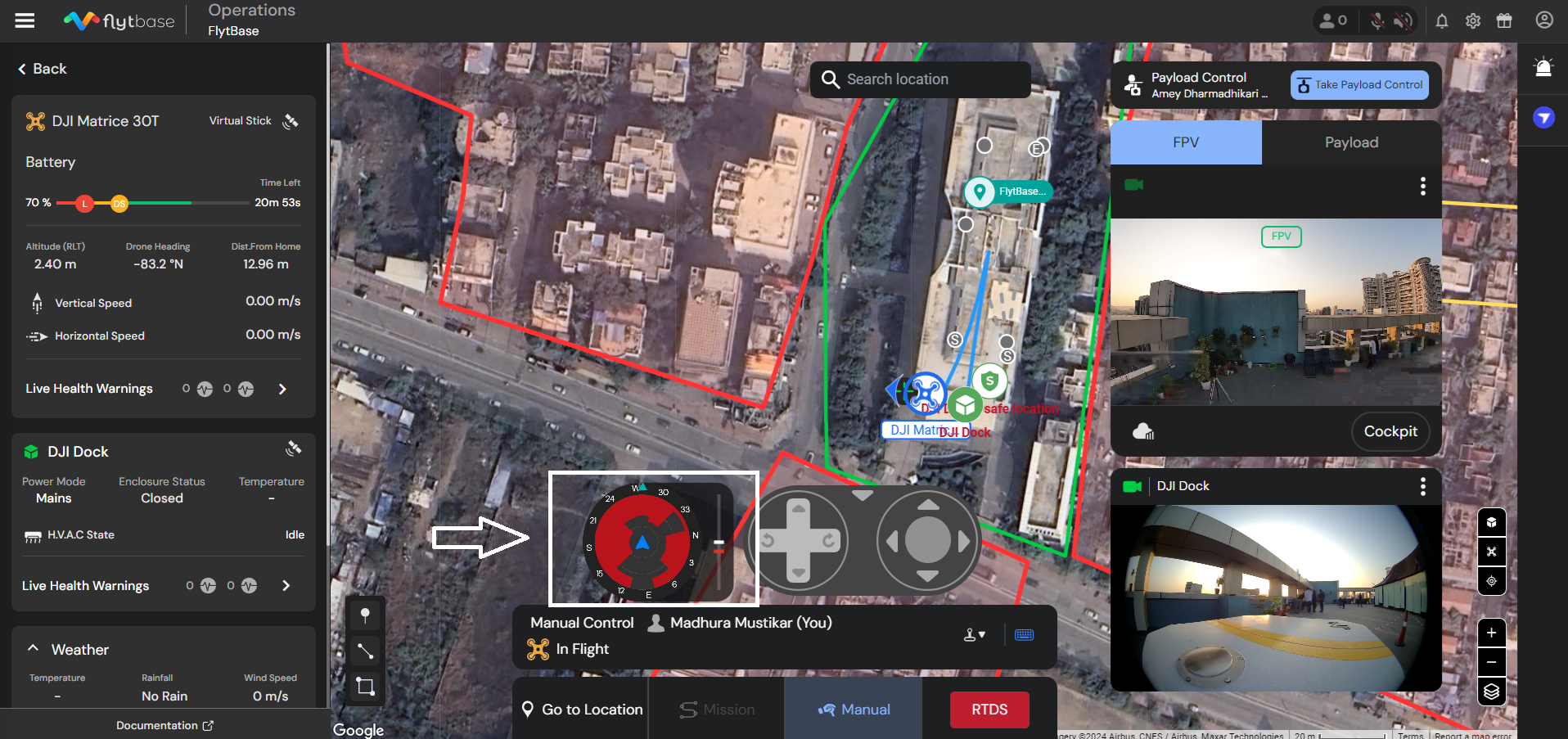
Affichage de navigation CAS lors des commandes manuelles
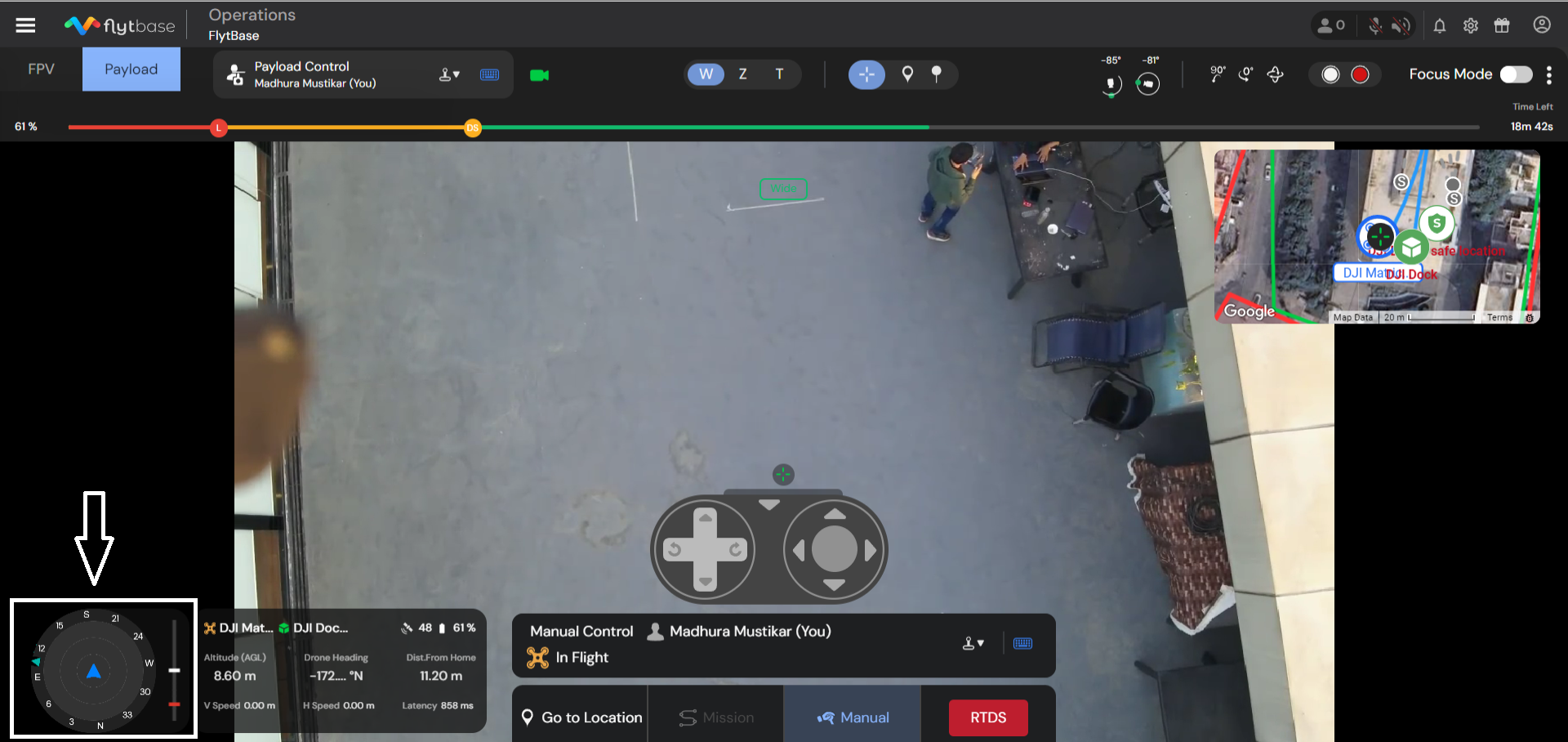
Affichage de navigation CAS en vue Cockpit