Home > Gestion des appareils > Paramètres de l’appareil
Collision Avoidance Sensing (CAS)
En savoir plus sur la façon de configurer Collision Avoidance Sensing pour votre drone dans le tableau de bord FlytBase.
Collision Avoidance Sensing permet à votre drone de détecter des obstacles en temps réel.
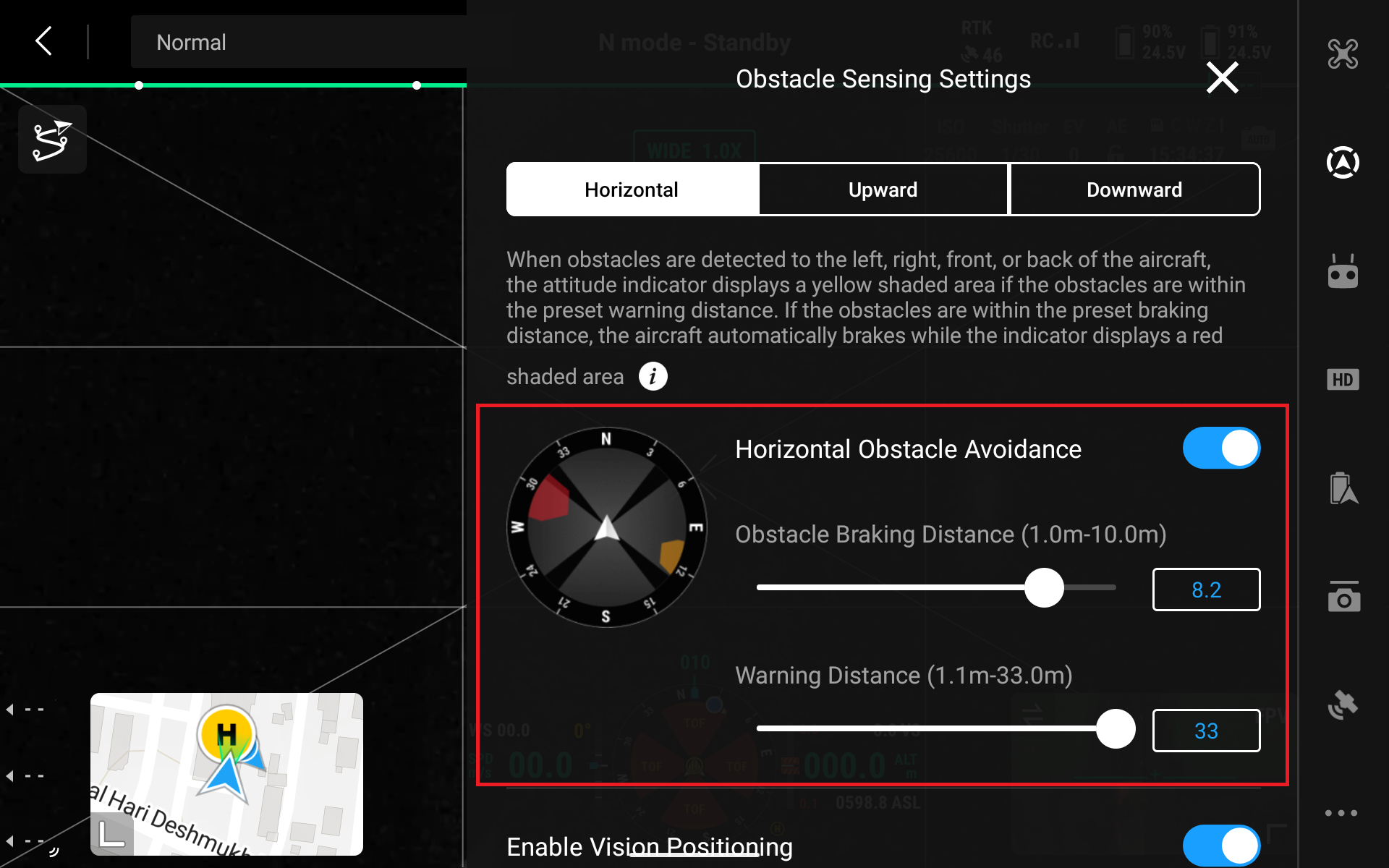
Pour configurer cette fonctionnalité pour votre drone, accédez à l’application DJI Pilot 2, où vous pouvez activer/désactiver la fonctionnalité « Obstacle Avoidance » et définir les distances de freinage et d’avertissement pour votre drone. Le drone respectera les paramètres de la RC et s’arrêtera automatiquement lorsqu’un obstacle est détecté à l’intérieur de sa distance de freinage.
Votre drone possède deux types de systèmes de détection : le système de vision et le système de détection infrarouge. Ces systèmes fonctionnent ensemble, permettant au drone de détecter des objets et de s’arrêter à une distance de freinage définie.
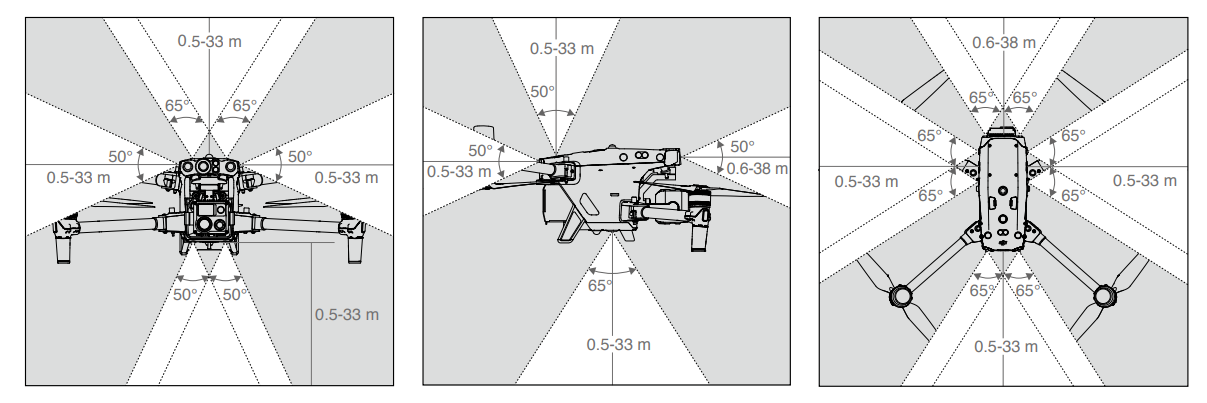
Pour plus de détails sur le comportement de Obstacle Sensing, consultez le DJI User Manual , en particulier les pages 39 à 47.
Configurer Collision Avoidance Sensing pour votre drone
La distance d’avertissement (warning distance) doit être supérieure à la distance de freinage (braking distance).
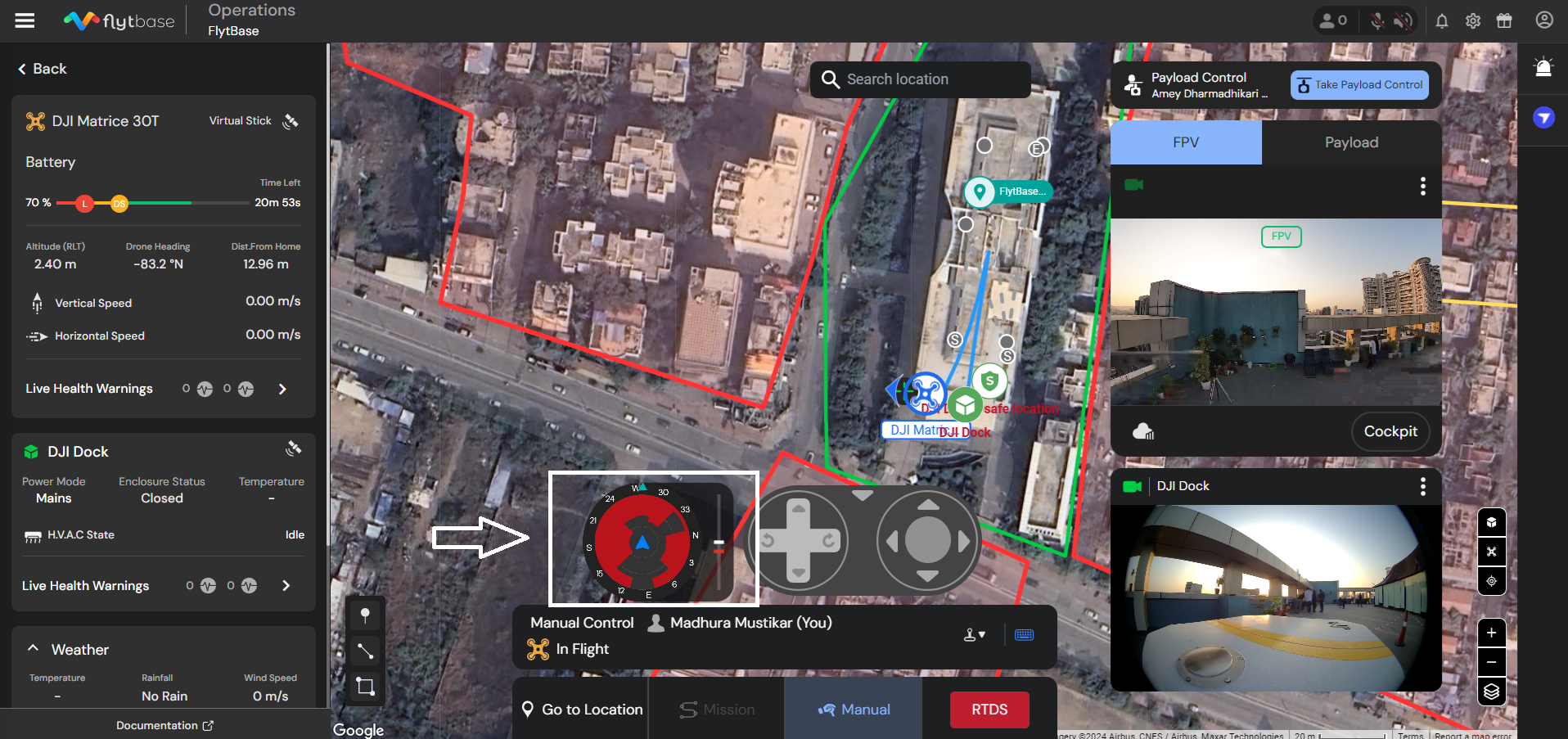
Accéder à Collision Avoidance Sensing (CAS) dans le tableau de bord FlytBase
Cliquez sur le bouton

Comportement attendu
Scenario Description Behaviour
Drone is performing an autonomous mission. It detects an obstacle on its path. The drone will stop at the configured braking distance and hover. You can either take in manual controls to move around or perform RTH.
Drone is performing RTH It detects an obstacle on its path. The drone will stop at the configured braking distance and hover. You can take in manual controls to move the aircraft away.
Drone is performing a manual mission. It detects an obstacle on its path. You will be able to see nearby obstacles on the navigation display for enhanced situational awareness. The drone will stop at a configured braking distance and hover. You can then perform RTH.