Home > Modules pré-vol > Mission Breakpoint
Mission Breakpoint
La fonctionnalité Mission Breakpoint est conçue pour vous permettre de reprendre une mission à partir du dernier point d’interruption. Voici un guide détaillé sur les cas d’utilisation et la façon de l’utiliser.
Mission Breakpoint
La fonctionnalité Mission Breakpoint vise à gérer les interruptions pendant les missions. Ces interruptions peuvent être dues à des enjeux techniques, opérationnels, environnementaux ou de sécurité.
Causes courantes d’interruption de mission
- Hardware Issues : Défaillances telles qu’une batterie faible, un GPS défectueux, des dommages aux rotors ou hélices, ou des pannes de capteurs.
- Communication Failures : Interruptions de signal entre le drone et sa station d’accueil.
- Manual Intervention : Prise de contrôle par l’opérateur en raison de risques perçus ou pour effectuer des manœuvres manuelles.
- Mission Planning Errors : Waypoints mal configurés, paramètres d’altitude incorrects ou limites de géorepérage (geofencing) inadéquates.
- Radio Frequency Interference (RFI) : Perturbations causées par des appareils ou systèmes électroniques à proximité.
- Return to Home (RTH) Activation : Déclenché par une batterie faible, une perte de signal ou des seuils de sécurité.
- Fail-Safe Mode : Arrêt automatique des missions en raison de l’activation des fail-safes de l’appareil ou des conditions météo.
Aperçu du Breakpoint
- Un Breakpoint représente l’avancement exact auquel le drone interrompt sa mission en raison d’un événement volontaire ou involontaire.
- La fonctionnalité Mission Breakpoint permet de reprendre une mission incomplète à partir du dernier point atteint plutôt que de recommencer au début. La reprise dépend du type de mission :
- Path Mission : Reprend à partir du dernier waypoint atteint avant l’interruption.
- Grid Mission : Reprend à partir du dernier angle net (sharp angle) couvert pendant le vol précédent.
Utiliser la fonctionnalité Breakpoint
-
Execute a Mission : Lancez une mission planifiée à l’avance à partir du Drone Control Panel.
Consultez la section FlytBase Flight Execution pour exécuter une mission planifiée à l’avance.
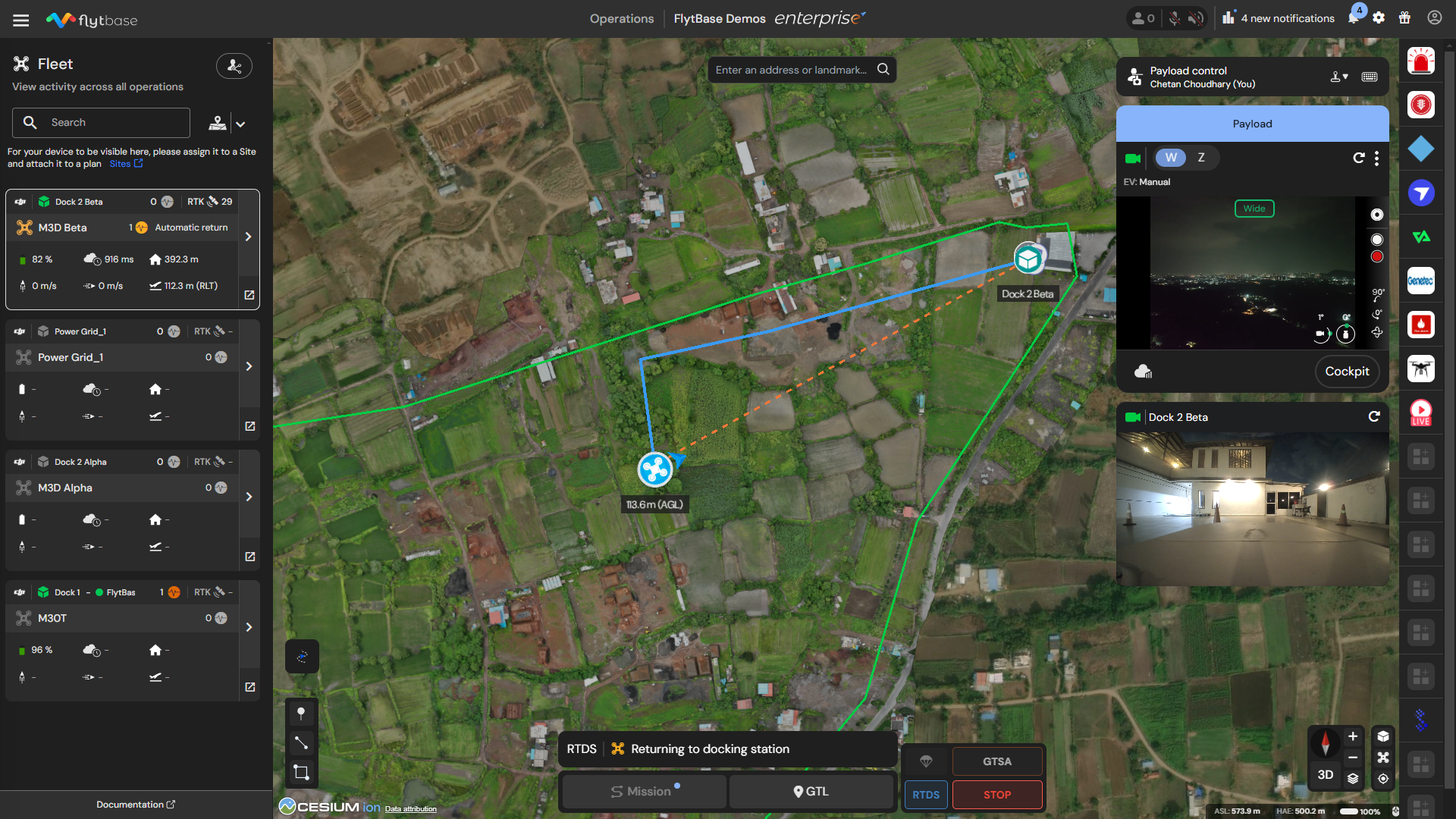
-
Abort Mission : Cliquez sur le bouton RTH (Return to Home) dans le panneau de commande du drone pour interrompre la mission de façon sécuritaire et ramener le drone au dock.
-
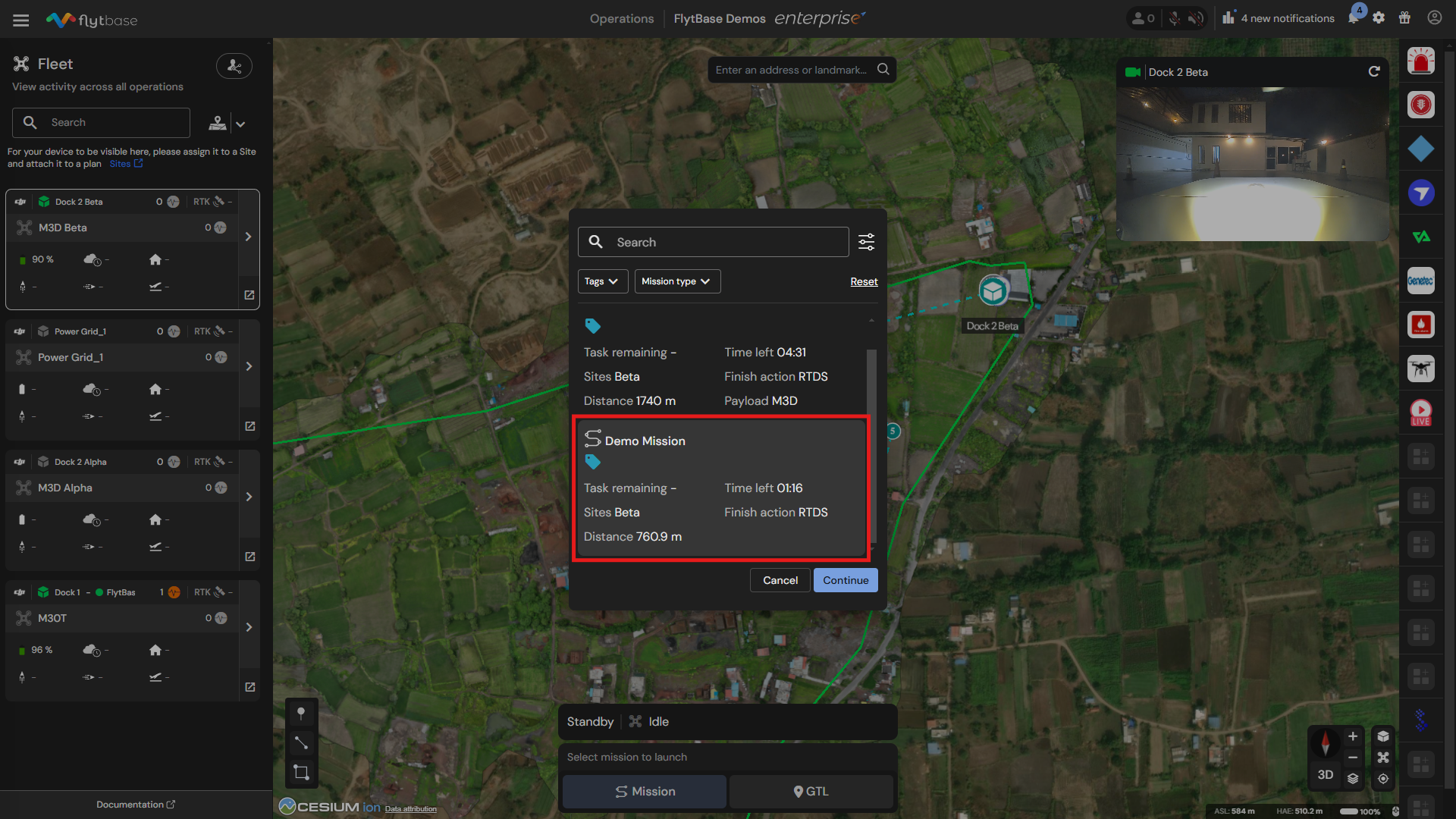
Access Saved Missions :
- Accédez à l’onglet Mission dans le panneau de commande du drone. L’onglet Mission affichera un petit point bleu indiquant qu’il y a des missions incomplètes.
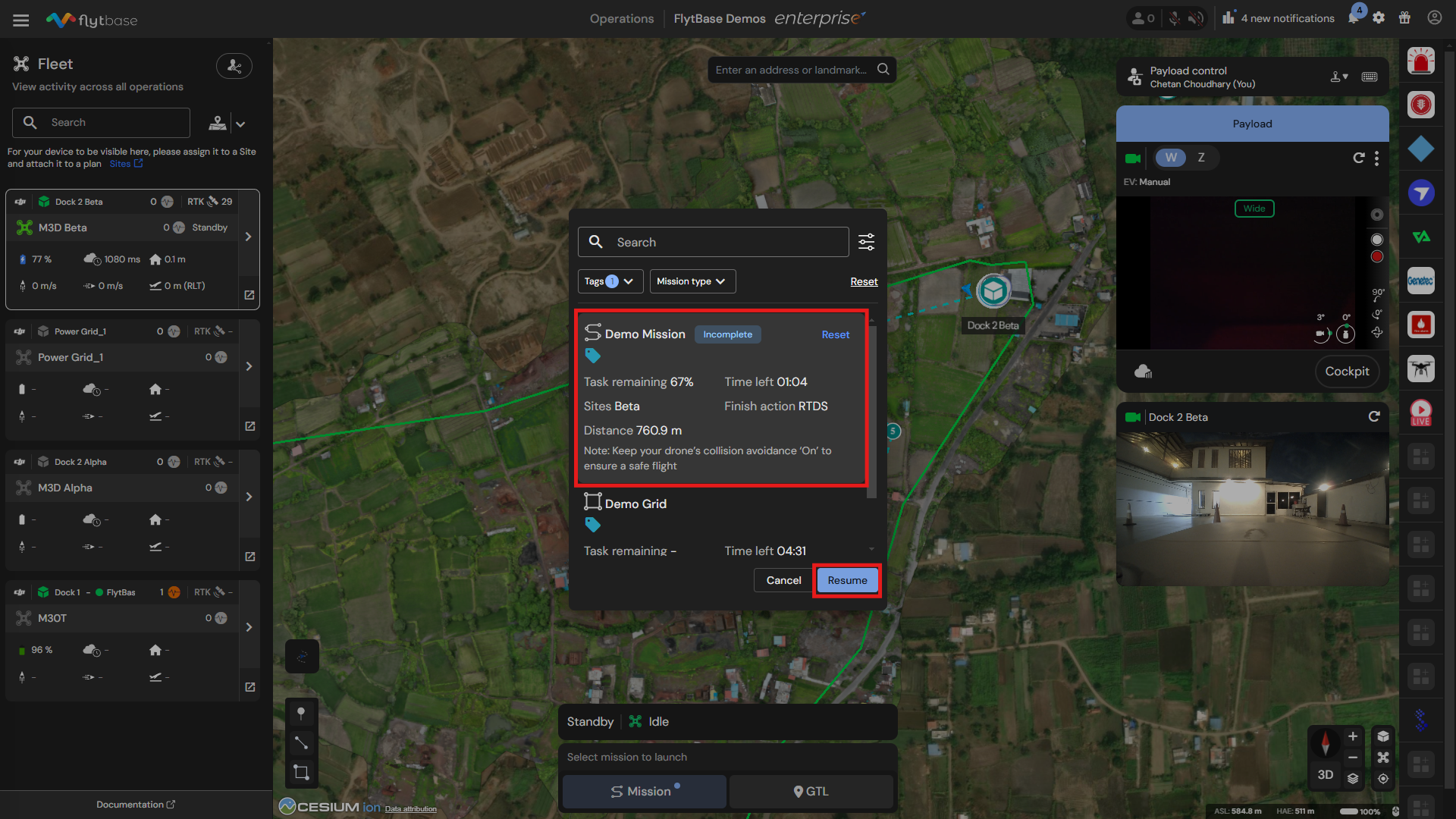
- Les missions incomplètes sont identifiées par l’étiquette Incomplete et affichent des détails pertinents, comme le pourcentage restant et le temps d’achèvement estimé.
-
Resume Mission :
- Sélectionnez la mission incomplète souhaitée, puis cliquez sur « Resume ».
- Confirmez les paramètres de la checklist de sécurité, puis cliquez sur « Launch ».
-
Completion : Le drone reprendra à partir du Breakpoint désigné :
-
Pour les Path Missions : la mission reprend à partir du dernier waypoint atteint avant l’interruption.
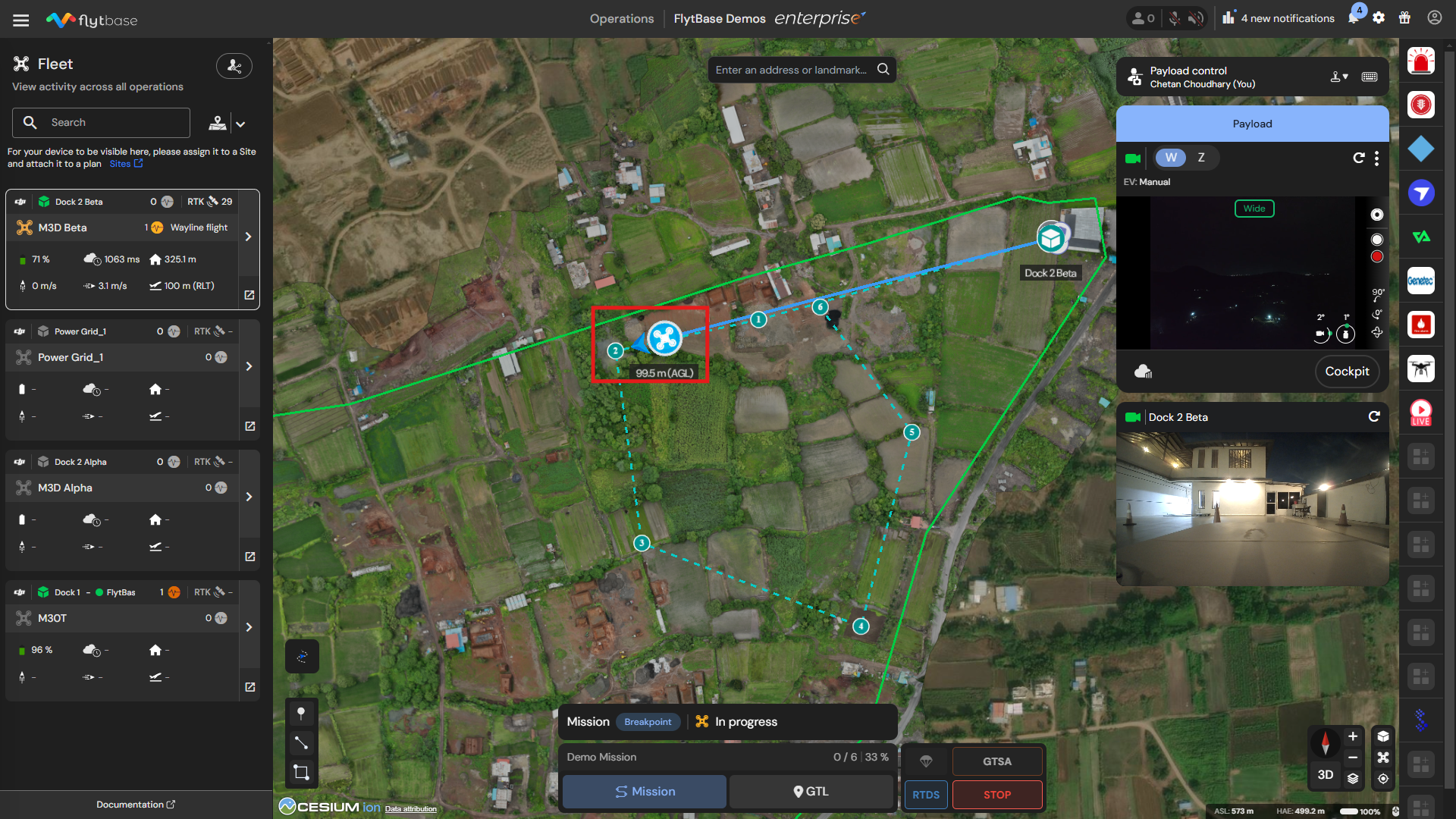
-
-
Pour les Grid Missions : la mission reprend à partir du dernier angle net (sharp angle) couvert pendant le vol précédent.

Info
Vous pouvez recommencer n’importe quelle mission incomplète en cliquant sur le bouton Reset à côté de celle-ci dans l’Missions Tab du Drone Control Panel.
Scénarios où Breakpoint peut être utilisé
- Mission interrompue en raison d’enjeux techniques, opérationnels ou environnementaux.
- Mission interrompue par une action manuelle RTH.
- Intervention manuelle via le bouton STOP, suivie de la commande RTH.
Scénarios où Breakpoint ne peut pas être utilisé
- Missions supprimées.
- Missions dont les paramètres ont été modifiés.
- Missions interrompues avant que le drone n’atteigne le premier waypoint.
- Missions réinitialisées via le Operations Dashboard.
Reprendre des missions en vol (mid-air)
Si la mission est arrêtée en cours de vol pour un manual control ou une commande Go-To-Location (GTL), elle peut tout de même être reprise à partir du dernier waypoint.
Info
Si RTH est lancé, la reprise n’est possible qu’après le retour du drone au dock.