Home > Modules en vol > Aller à un emplacement (GTL)
Aller à un emplacement (GTL)
Un guide pour envoyer rapidement le drone vers un emplacement précis.
La fonctionnalité Go to Location (GTL) permet à un drone de voler de façon autonome vers un point GPS spécifié. Les utilisateurs peuvent marquer l’emplacement dans le Dashboard FlytBase, puis le drone s’y rendra et se mettra en vol stationnaire. Une fois sur place, le drone peut être contrôlé manuellement pour effectuer les actions souhaitées.
Info
The Go to Location feature can be used even when the drone is powered off. The drone will automatically power on once the Go-to Location command is initiated.
La fonctionnalité Go to Location peut être utilisée même lorsque le drone est éteint. Le drone s’allumera automatiquement dès que la commande Go to Location est lancée.
Démarrer un vol Go to Location (GTL)
- Cliquez sur … et sélectionnez Fleet.
- Sélectionnez le drone souhaité dans la liste des drones disponibles.
- Dans le Drone Control Panel, sélectionnez …
- Une fenêtre de configuration s’affiche, vous permettant de sélectionner un emplacement sur la carte et d’ajuster les paramètres de vol.
- Cliquez sur la carte pour déposer une épingle à l’emplacement désiré.
- Ajustez les paramètres de mission au besoin afin de garantir une trajectoire sécuritaire et d’éviter les obstacles.
- Cliquez sur Launch.
- Complétez la liste de vérification avant vol, puis cliquez sur Execute.
https://youtu.be/Ytxh5SSIrVs youtu.be [Vidéo] Démarrer un vol Go to Location
Paramètres de vol pour Go to Location
-
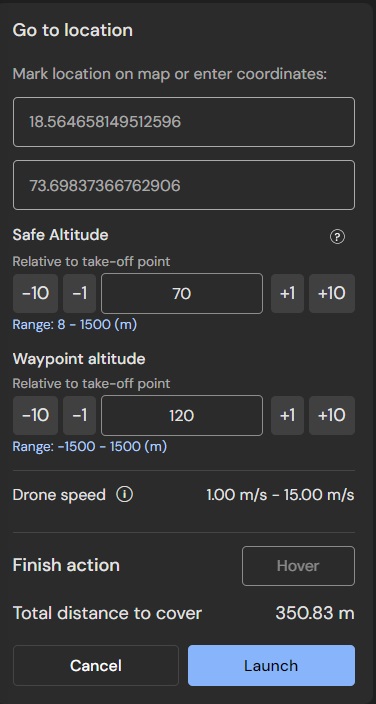
Latitude et longitude du waypoint.
- Cliquez sur la carte pour déposer une épingle à l’emplacement désiré.
-
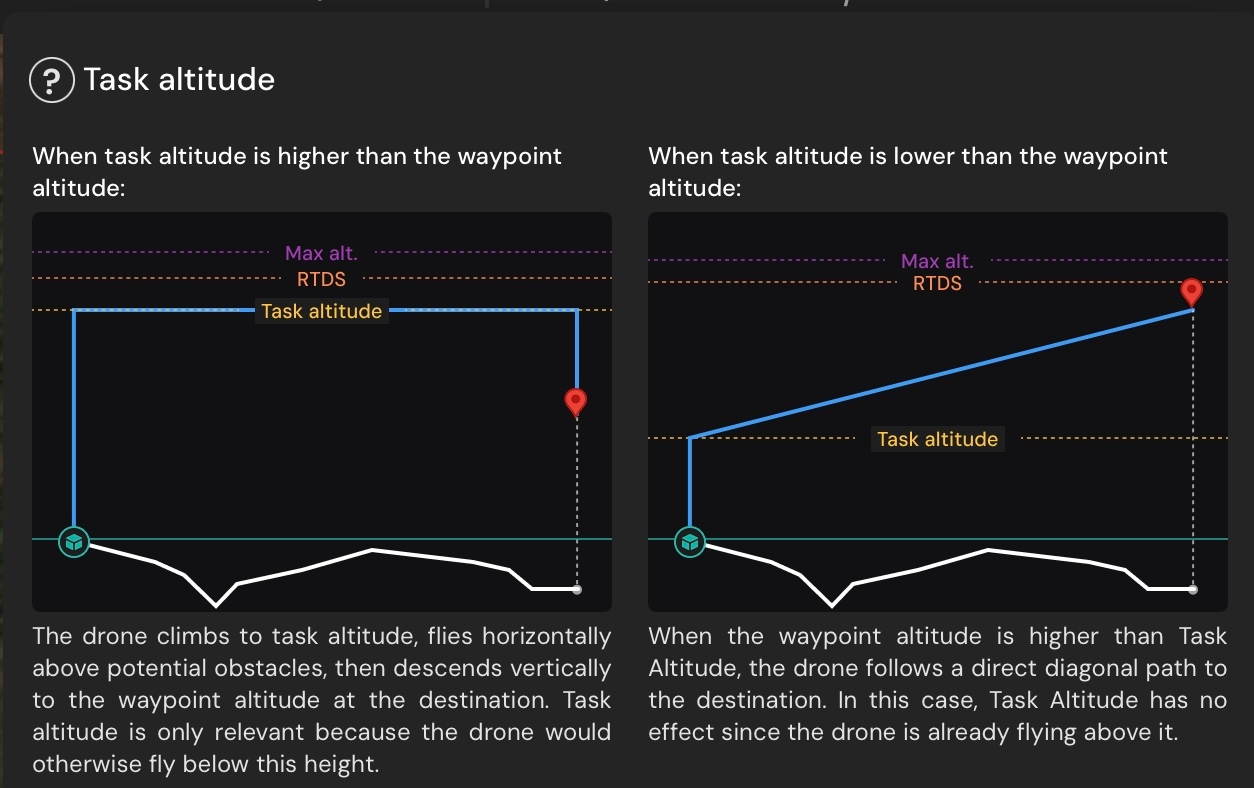
Task Altitude : ce paramètre définit une hauteur de croisière dédiée entre le décollage et la destination Go To Location (GTL), offrant une meilleure marge par rapport aux obstacles et un meilleur contrôle de la trajectoire pendant le vol.
- Task Altitude n’influence la trajectoire que lorsque le drone volerait autrement sous cette hauteur. Si votre drone est déjà au-dessus de Task Altitude, il conserve sa hauteur actuelle.
- Au début d’un Go To Location, le drone montera à la plus élevée entre Safe Takeoff Altitude et Task Altitude.
- Les changements de Task Altitude pendant un vol ne s’appliquent qu’aux commandes Go To Location suivantes, pas à la trajectoire en cours.
- Après un événement Go To Safe Altitude (GTSA), Task Altitude peut être temporairement modifiée à la hauteur GTSA. Vous verrez un indicateur ainsi qu’une option pour restaurer les réglages précédents.
- Ce paramètre peut être prédéfini dans la page Device Settings afin de configurer des valeurs par défaut persistantes d’un vol à l’autre.
Vos réglages Comportement du drone Quand l’utiliser
Task Altitude est le plus élevé Le drone monte verticalement jusqu’à Task Altitude, vole à niveau vers la destination en maintenant cette hauteur, puis descend verticalement jusqu’à l’altitude finale. Cela crée une séparation claire entre les phases de montée, de croisière et de descente. Survoler des obstacles ou du relief – Parfait pour franchir des forêts, des bâtiments ou des collines lorsque vous avez besoin d’une marge garantie sur toute la trajectoire.
Safe Altitude est le plus élevé Le drone monte d’abord jusqu’à Safe Altitude pour assurer la sécurité immédiate au décollage, puis s’ajuste à la baisse vers Task Altitude pour un déplacement efficace, et descend enfin vers l’altitude de destination. Cela offre un compromis entre sécurité et efficacité. Missions standard – Bon équilibre sécurité/efficacité pour la plupart des opérations de routine où une marge au décollage est nécessaire sans exiger une altitude de croisière maximale.
Waypoint Altitude est le plus élevé Le drone monte graduellement tout en avançant, suivant une trajectoire diagonale directement vers la destination. Task Altitude est alors ignoré puisqu’il serait inférieur aux altitudes actuelle et cible, ce qui rend le vol aussi efficace que possible. Voler en montée vers des destinations plus élevées – Le plus efficace lorsque votre destination est à une altitude plus élevée que le point de décollage (p. ex., du sol vers un toit ou le sommet d’une colline).
Info
Visualization Enhancements: The Terrain Profile Graph includes a visual representation of the Task Altitude, helping you plan and visualize your complete flight path before execution.
Améliorations de visualisation : le graphique de profil de terrain (Terrain Profile Graph) inclut une représentation visuelle de Task Altitude, ce qui vous aide à planifier et à visualiser la trajectoire complète avant l’exécution.
Warning
Compatibility: This feature is compatible with all currently supported DJI docks. Task Altitude is not supported for legacy GTL operations.
Compatibilité : cette fonctionnalité est compatible avec toutes les stations DJI actuellement prises en charge. Task Altitude n’est pas pris en charge pour les opérations GTL héritées.
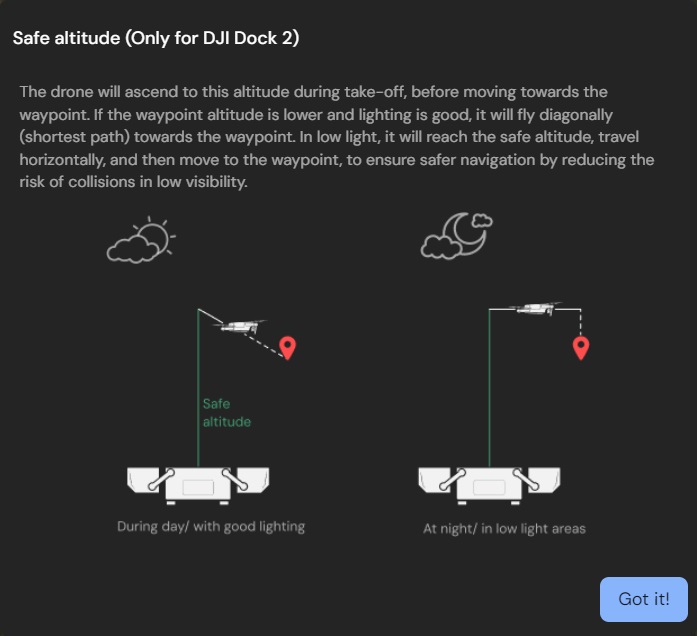
- Safe Altitude : ce réglage précise l’altitude que le drone atteindra après le décollage. Une fois à cette altitude, le drone se dirige vers le waypoint.
- Si l’altitude du waypoint est plus élevée que Safe Altitude, le drone volera en diagonale vers le waypoint.
- L’approche du drone vers un waypoint à une altitude inférieure à Safe Altitude peut varier selon les conditions d’éclairage ambiant.
- Waypoint Altitude : altitude que le drone maintient lorsqu’il atteint les coordonnées spécifiées du waypoint.
Info
You can set the Take-Off Altitude to be the same as the Waypoint Altitude.
Vous pouvez régler l’altitude de décollage (Take-Off Altitude) pour qu’elle soit identique à l’altitude du waypoint.
- Drone Speed, Finish Action, and Total Distance to Cover : ces paramètres ne peuvent pas être modifiés, mais leur présence dans la fenêtre de configuration fournit l’information nécessaire pour compléter le vol Go to Location.
Warning
You cannot adjust the drone’s speed during the ‘Go to Location’ operation. The drone will gradually reach a velocity of 15 m/s over the specified distance.
Vous ne pouvez pas ajuster la vitesse du drone pendant l’opération Go to Location. Le drone atteindra graduellement une vitesse de 15 m/s sur la distance spécifiée.
- Cliquez sur Launch pour envoyer le drone à l’emplacement spécifié.
Info
You can also use the Go to Location function to launch the drone to a specific location during a mission. You can do this by: STOP the current mission for the desired droneClick on in Drone Control PanelMark the location on the mapConfigure flight settings Click on Launch and clear the pre-flight checklist
Vous pouvez aussi utiliser la fonction Go to Location pour envoyer le drone vers un emplacement précis pendant une mission. Pour ce faire :
- STOP la mission en cours pour le drone souhaité
- Cliquez sur … dans le Drone Control Panel
- Marquez l’emplacement sur la carte
- Configurez les paramètres de vol
- Cliquez sur Launch et complétez la liste de vérification avant vol
Comportement attendu du drone pendant Go to Location
- Le drone montera à la plus élevée entre Safe Altitude et Task Altitude (par rapport à la station d’accueil).
- Ensuite, le drone se déplacera vers les coordonnées du waypoint, atteignant progressivement une vitesse maximale de 15 m/s, tout en ajustant son altitude selon la configuration Task Altitude.
- Le drone se met en vol stationnaire une fois l’emplacement atteint.
Info
While the drone is en route to the marked location, you can pause the Go to Location action at any time using the STOP button on the FlytBase Dashboard.
Pendant que le drone se dirige vers l’emplacement marqué, vous pouvez mettre en pause l’action Go to Location à tout moment en utilisant le bouton STOP dans le Dashboard FlytBase.