Home > Gestion des appareils > Paramètres (dispositifs de sécurité)
Paramètres
Mots-clés (failsafes)
Failsafe Events, Failsafe Actions, Low Battery, Critical Battery, Link Loss
Aperçu
Les événements failsafe sont des urgences imprévues, comme une perte de communication, une batterie faible ou des conditions météo défavorables, qui exigent des actions immédiates et prédéfinies afin d’assurer la sécurité du drone. Configurer des réponses failsafe est crucial pour l’exploitation sécuritaire et prévisible de drones autonomes, afin de réduire les risques et de prévenir les accidents ou dommages.
FlytBase vous permet de configurer ces actions dans le cadre de Device Settings. En définissant à l’avance ces actions failsafe, vous vous assurez que votre drone peut gérer les urgences et maintenir la sécurité et la fiabilité pendant les opérations autonomes.
Actions failsafe et comportement attendu
Lorsqu’une urgence survient et nécessite des actions failsafe, le drone exécutera l’une des réponses prédéfinies en fonction des actions failsafe configurées.
Failsafe Action Behavior when Action is executed
Return To Home (RTH) Le drone volera vers la Docking Station à une vitesse et une altitude fixes. Il atterrira sur la Docking Station une fois qu’il aura atteint le bon emplacement.
Return to Safe Location (RTSL) Le drone se rendra au Safe Location marqué et atterrira.
Hover Le drone restera en stationnaire et l’utilisateur devra prendre le contrôle manuel à partir du tableau de bord FlytBase ou d’une RC secondaire.
Land Le drone atterrira à son emplacement actuel.
No Action Le drone poursuivra sa mission.
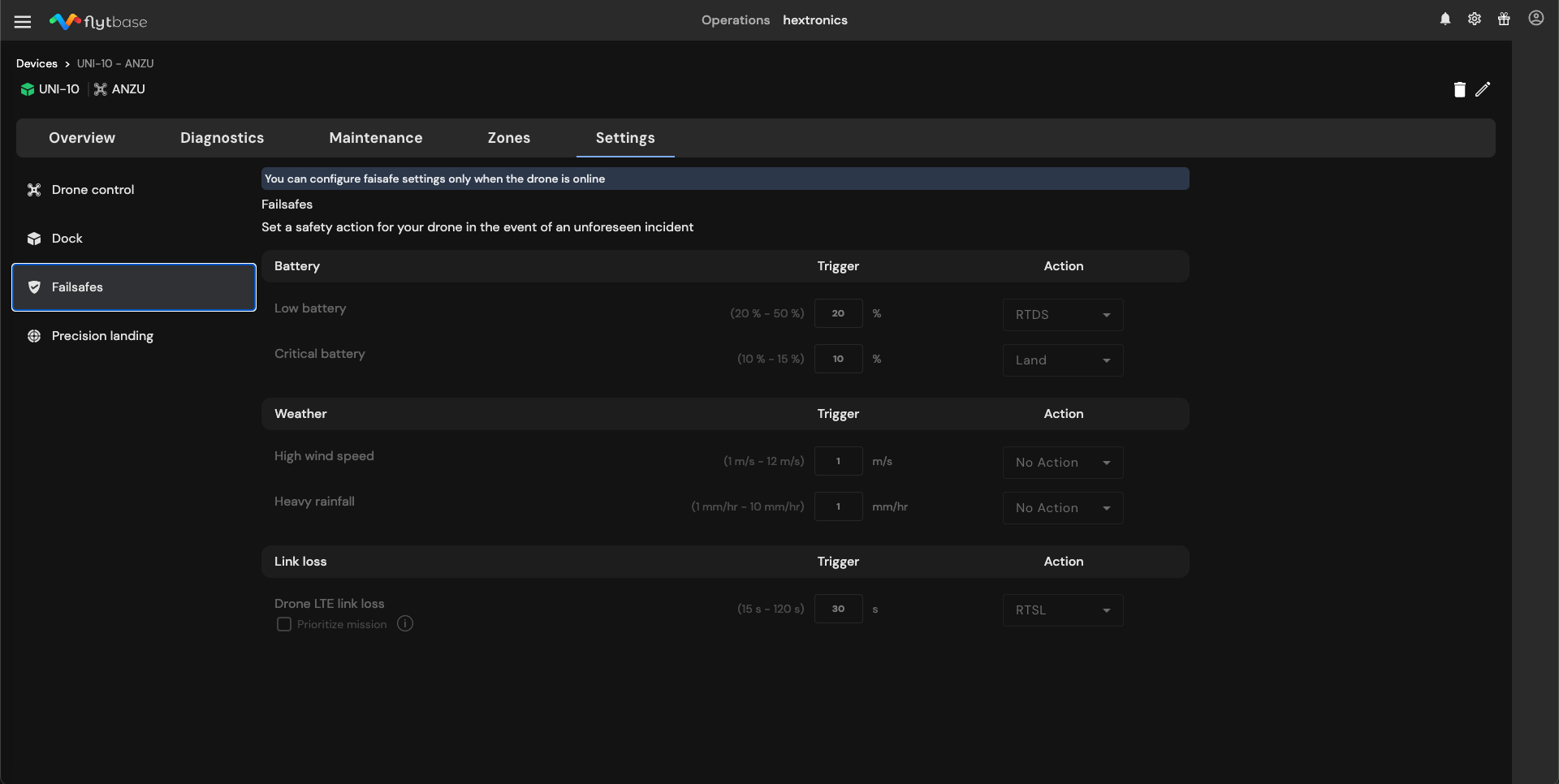
Paramètres Failsafe
Pour configurer les paramètres Failsafe pour un appareil donné, suivez ces étapes :
Accédez à Devices → Select your device → Settings, puis sélectionnez Failsafe.
Pour chaque événement failsafe, définissez la valeur Trigger dans la plage suggérée et une Failsafe Action.
Vous pouvez réinitialiser tous les champs en faisant défiler la liste vers le bas et en cliquant sur Reset.
Événements et actions Failsafe
Failsafe Event Event Description Available Actions Recommended Action
Low Battery Une batterie faible est indiquée lorsque la réserve d’énergie restante du drone est suffisante pour retourner au Dock et atterrir. Le seuil de cet événement peut être réglé entre 20 % et 50 %. RTH RTSL Land RTH or RTSL
Critical Battery Une batterie critique est indiquée lorsque la réserve d’énergie restante du drone est suffisante uniquement pour descendre de l’altitude actuelle et atterrir à l’emplacement actuel. Le seuil de cet événement peut être réglé entre 10 % et 15 %. Land Land
High Wind Speed Le drone ou la station météo sur le Dock peut détecter des vitesses de vent au-dessus d’un seuil défini, ce qui peut mettre en danger les opérations de vol. Dans ce cas, les opérations doivent s’arrêter et le drone doit retourner. RTH RTSL No Action RTH
Heavy Rainfall Des précipitations importantes peuvent endommager le drone. Pour prévenir un tel événement, le capteur de pluie de la station météo détecte des précipitations au-dessus du seuil défini et envoie une commande pour arrêter les opérations de vol au besoin. RTH RTSL No Action RTH
Drone LTE Link Loss Le drone et le Dock subissent une perte de liaison LTE lorsque le Dock n’est pas en mesure de communiquer avec le nuage en raison d’interruptions réseau. Vous pouvez définir un temps d’attente avant le déclenchement de l’action failsafe. RTH RTSL Hover No Action RTSL Note: enabling Prioritize Mission means the drone would continue with its mission if RC Link is working.
RC Link Loss La perte de liaison RC survient lorsque la connexion RF (y compris 4G LTE) entre le drone et le Dock est perdue. Vous pouvez définir un temps d’attente avant le déclenchement de l’action failsafe. RTSL Hover Land RTSL
GCS Link Loss La perte de liaison GCS se produit lorsque l’utilisateur ferme le tableau de bord FlytBase ou a une connectivité réseau faible avec le nuage alors que le drone est actif (ready-to-fly ou in-flight). Vous pouvez définir un temps d’attente avant le déclenchement de l’action failsafe. RTH RTSL Land Hover No Action RTSL
Precision Landing Timeout Pendant Precision Landing, le drone reste en stationnaire au-dessus de la zone d’atterrissage pendant un temps défini et tente de localiser le tag d’atterrissage. S’il ne peut pas trouver le tag ou maintenir sa position, l’opération Precision Landing se termine et un processus d’atterrissage alternatif commence. RTSL RTSL
Le safe landing location devrait être défini pour chaque appareil et devrait être dégagé de toute obstruction pouvant empêcher un atterrissage sécuritaire.