Home > Modules pré-vol > Path Mission
Path Mission
Guide sur la création d’une Path Mission à l’aide de waypoints dans le dashboard FlytBase.
Une Path Mission correspond à une opération de vol prédéfinie où le drone suit un itinéraire précis défini au moyen de waypoints. Le drone peut effectuer certaines actions aux waypoints et ajuster la vitesse et l’altitude entre ceux-ci. Ce type de mission est essentiel pour les tâches qui exigent des déplacements précis le long d’un parcours désigné, tout en offrant un contrôle sur le profil de vol.
Path Mission Planning
- Dans le Navigation Drawer, sélectionnez l’onglet Missions sous la section Planning.
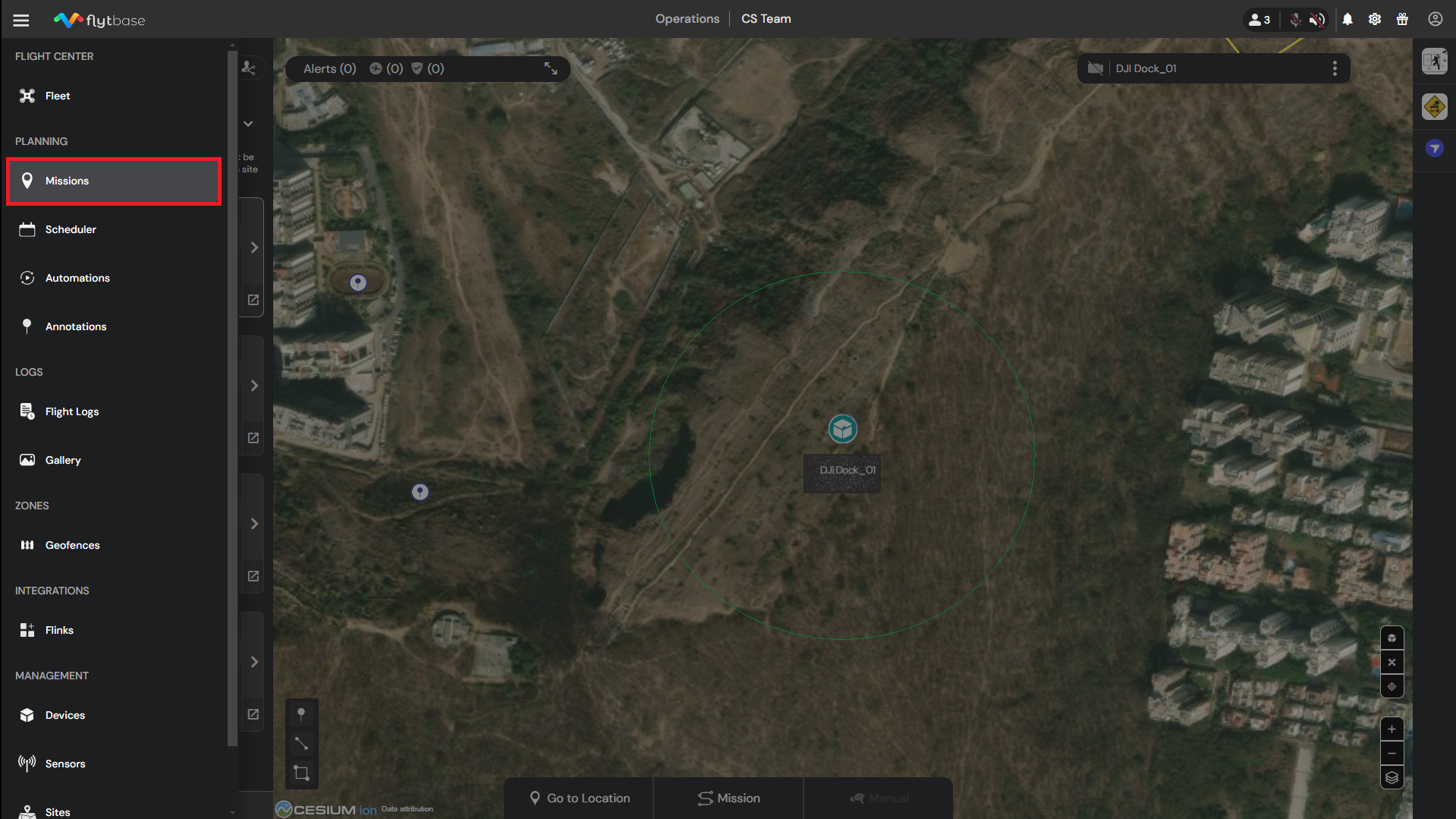
- Cliquez sur l’icône
 pour ajouter une mission.
pour ajouter une mission.
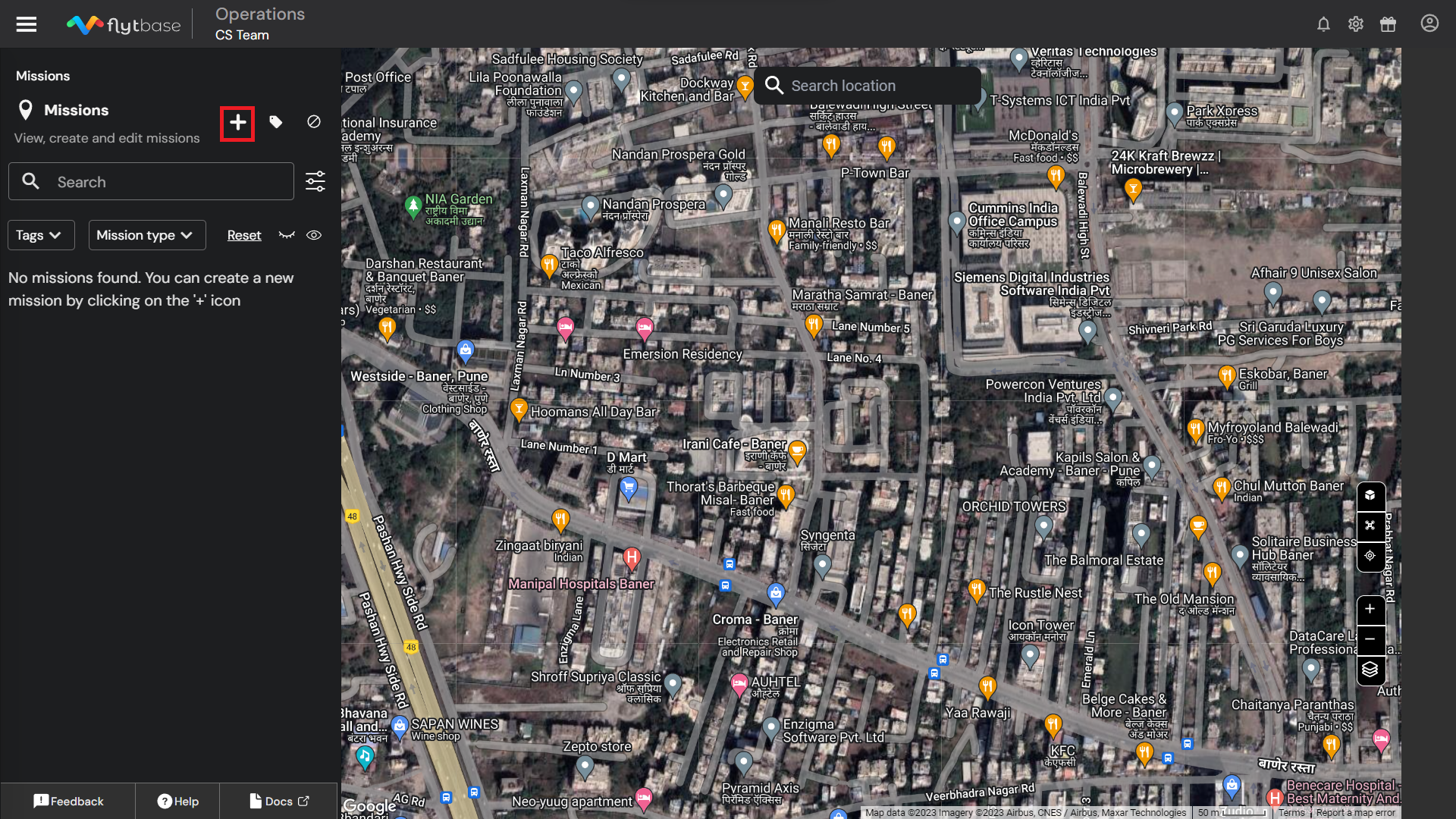
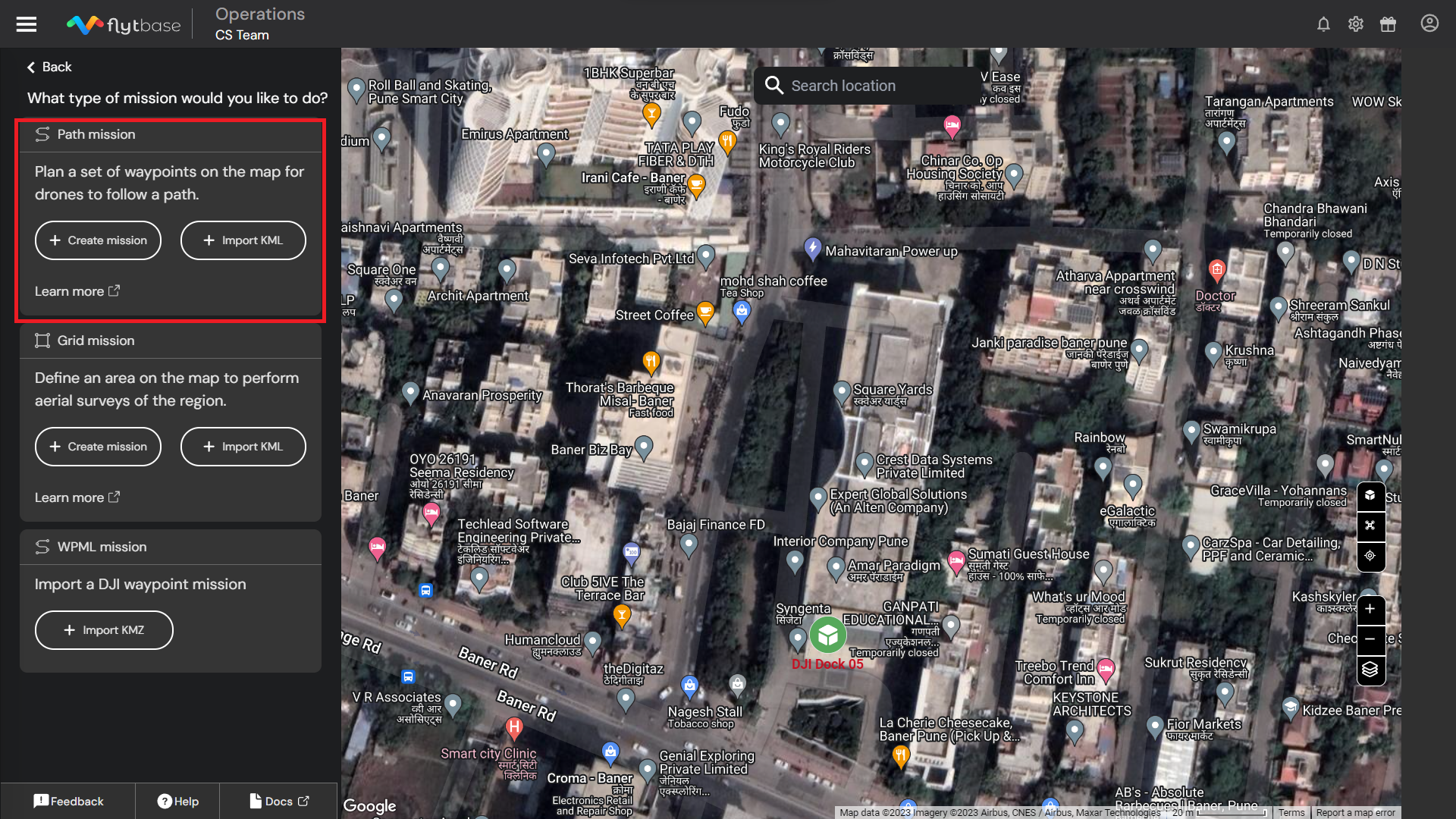
- Un opérateur peut planifier une Path Mission de deux façons :
- Create a mission
- Import a mission using a KML file
Créer une nouvelle mission par trajet
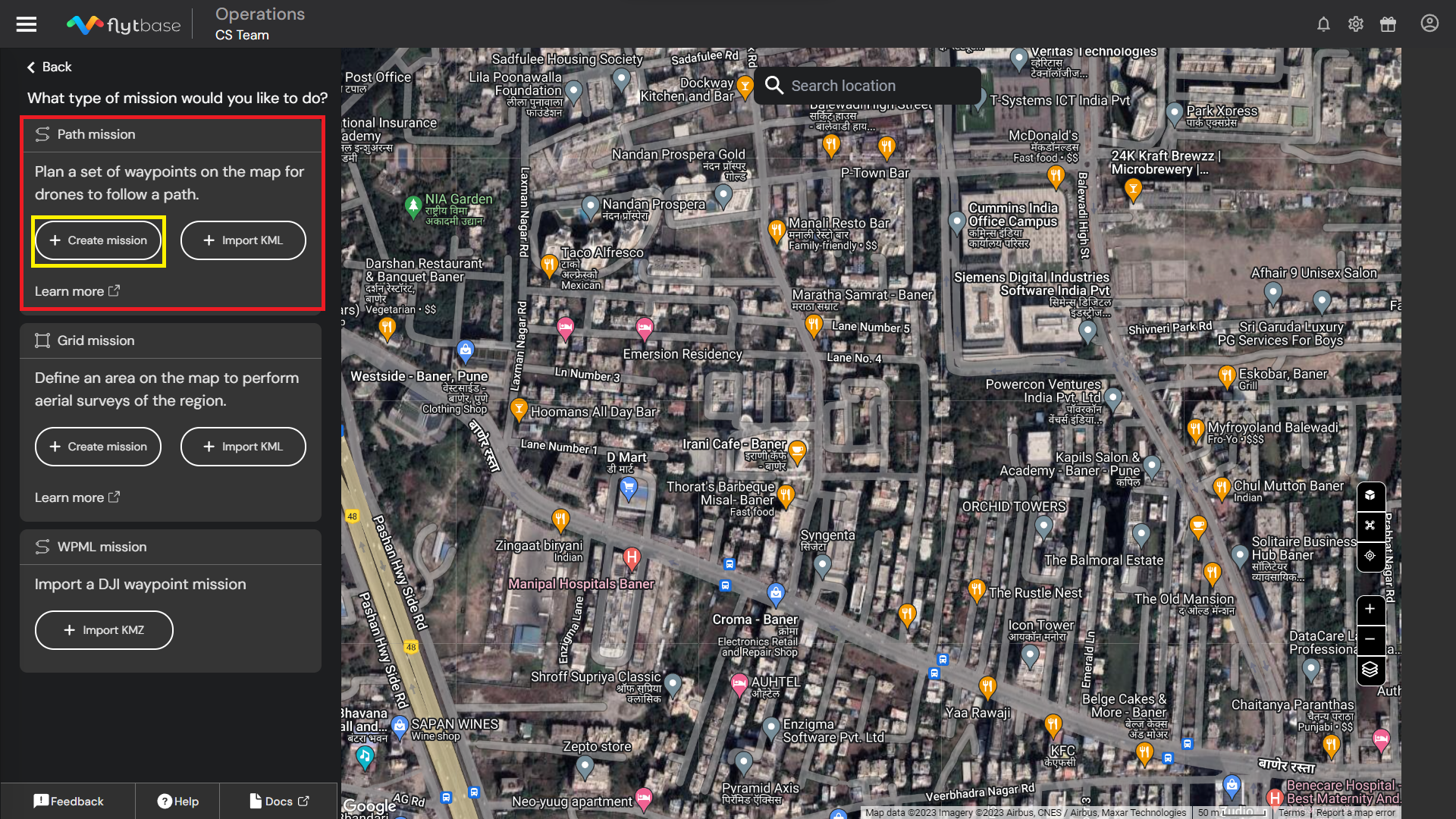
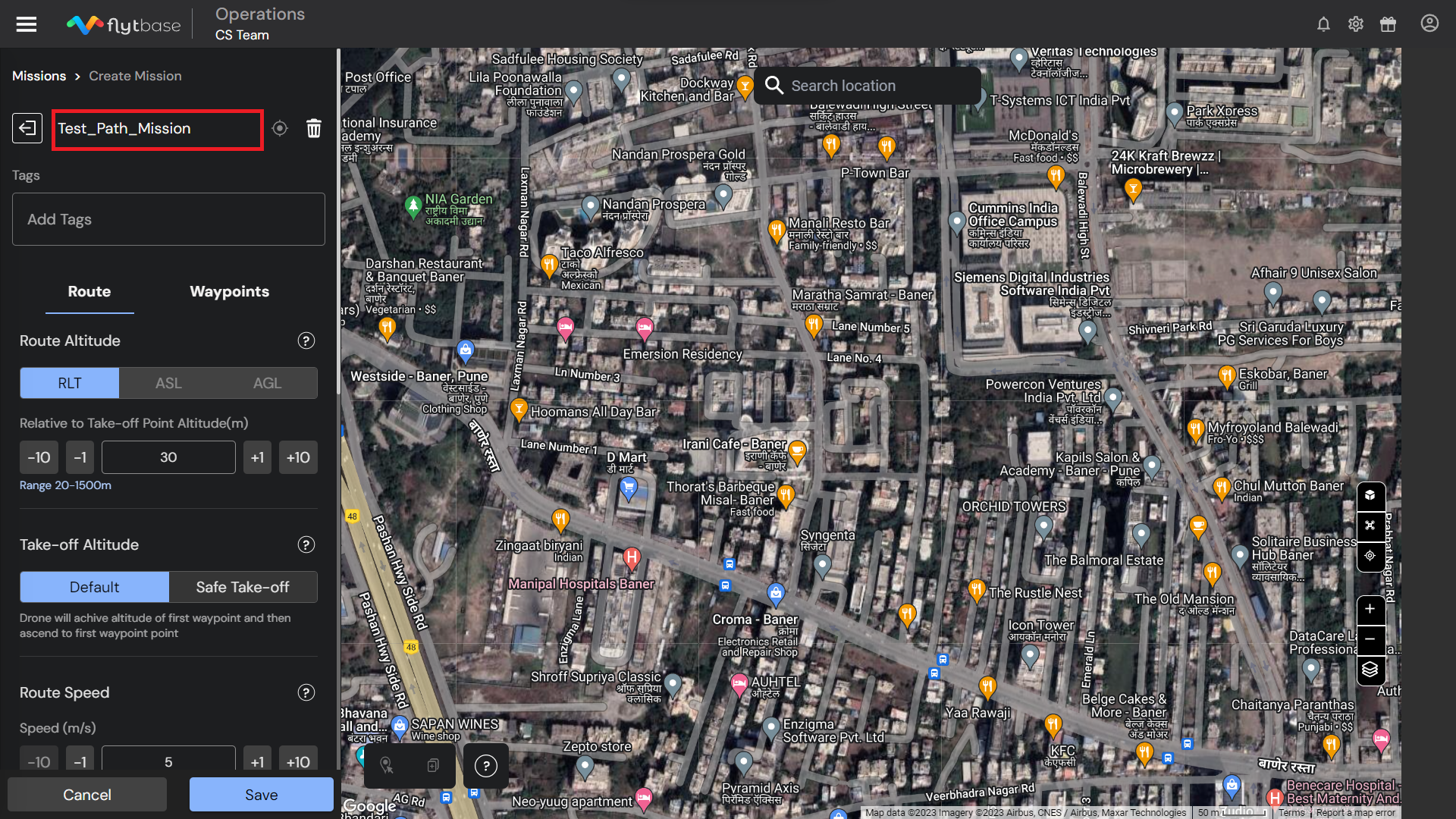
- Sous la section Path Mission, sélectionnez l’onglet + Create mission.
- Donnez un nom à la nouvelle mission.
- Sélectionnez le Site auquel vous souhaitez associer la mission. Seuls les membres du site sélectionné auront accès à la mission pour les opérations de drone. Consultez la documentation suivante pour en savoir plus :
Site Management
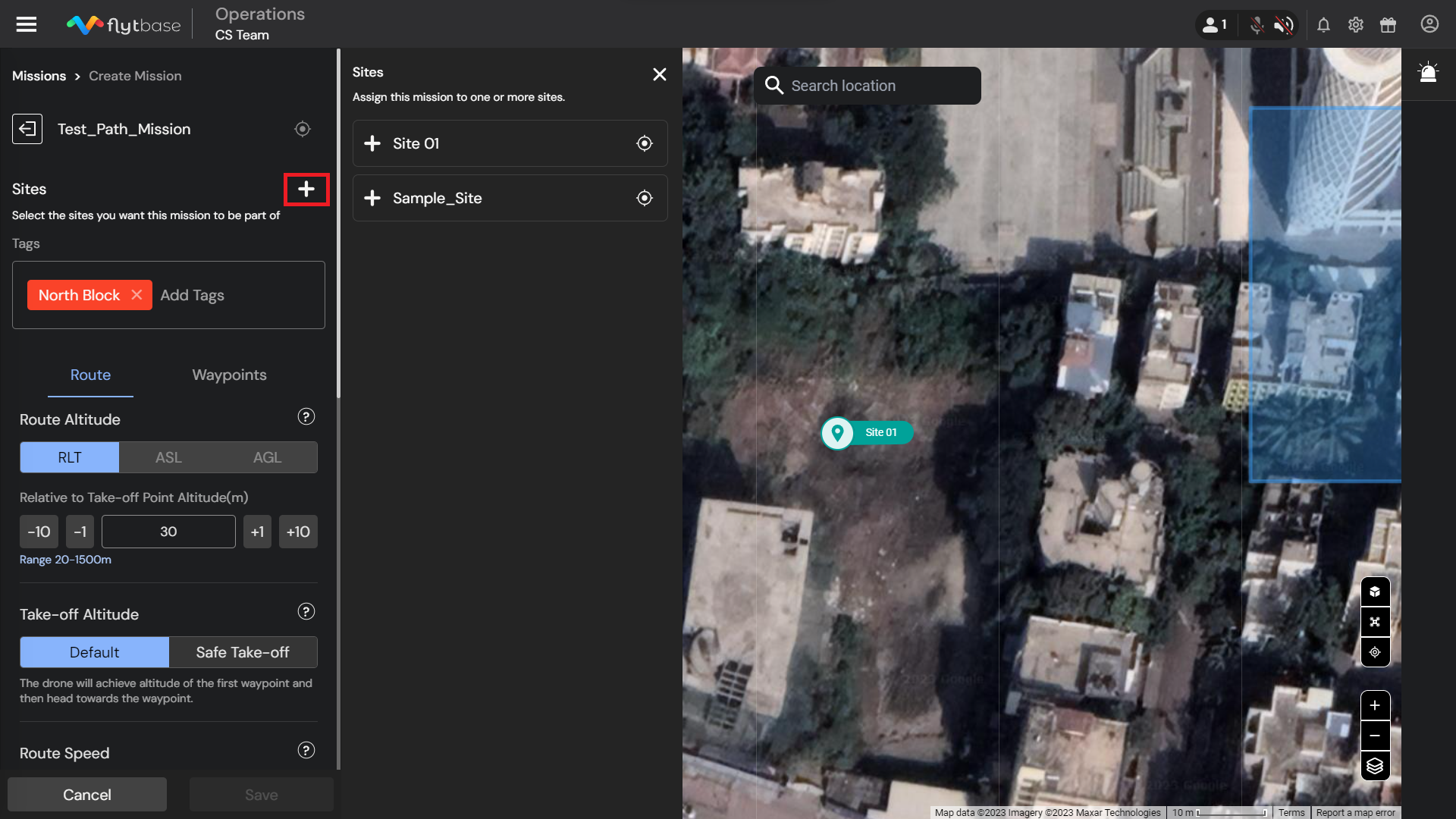
Vous pouvez ajouter une mission à plusieurs Sites.
- Assignez des Tags à votre mission pour une meilleure gestion.
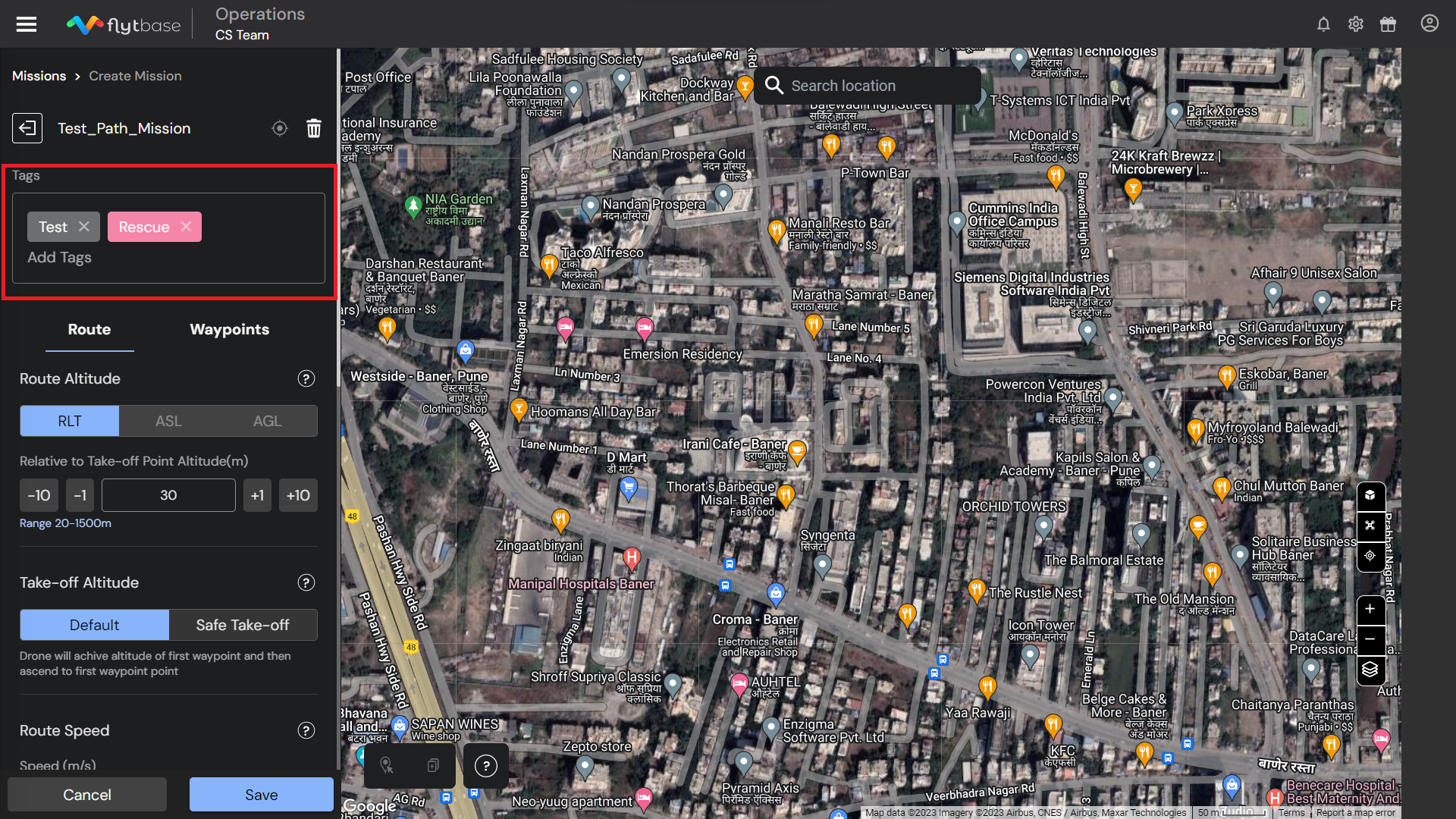
Pour en savoir plus sur la gestion des missions, consultez la documentation suivante. Mission Management
- Faites un Left-click sur la carte pour ajouter un waypoint.
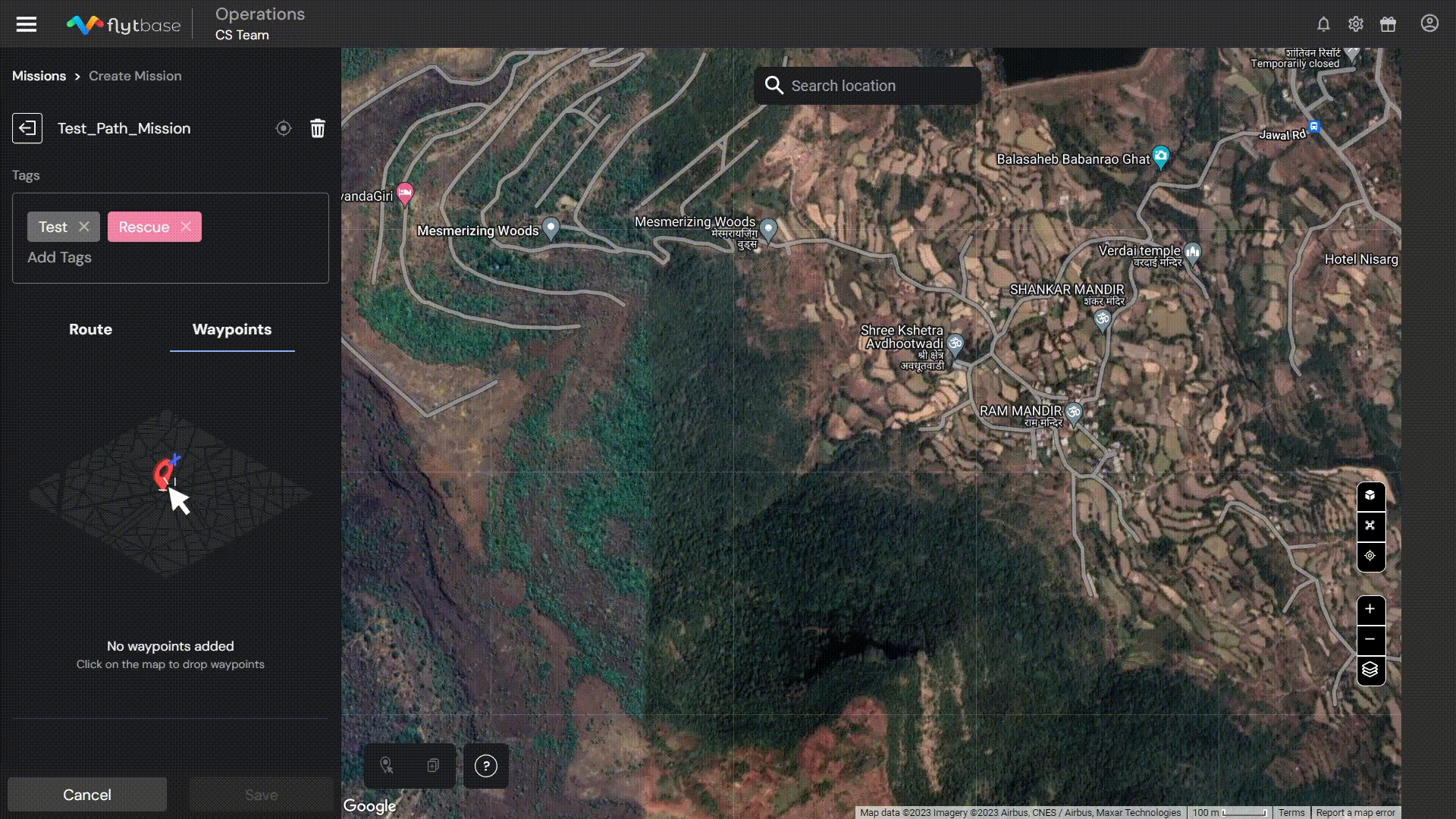
Recenter la carte vers l’emplacement de la mission en utilisant l’icône Recenter

Les opérateurs peuvent planifier efficacement des missions par trajet complexes avec plusieurs waypoints grâce aux Smart Selection Tools .
Configurer la route de mission et les paramètres de waypoints
Mission Route Parameters Waypoint Parameters
Vous pouvez configurer les paramètres de route suivants pour une Path Mission dans FlytBase.
1. Route Altitude
Il s’agit de l’altitude par défaut à laquelle la mission sera exécutée. Il existe trois types de références d’altitude de route :
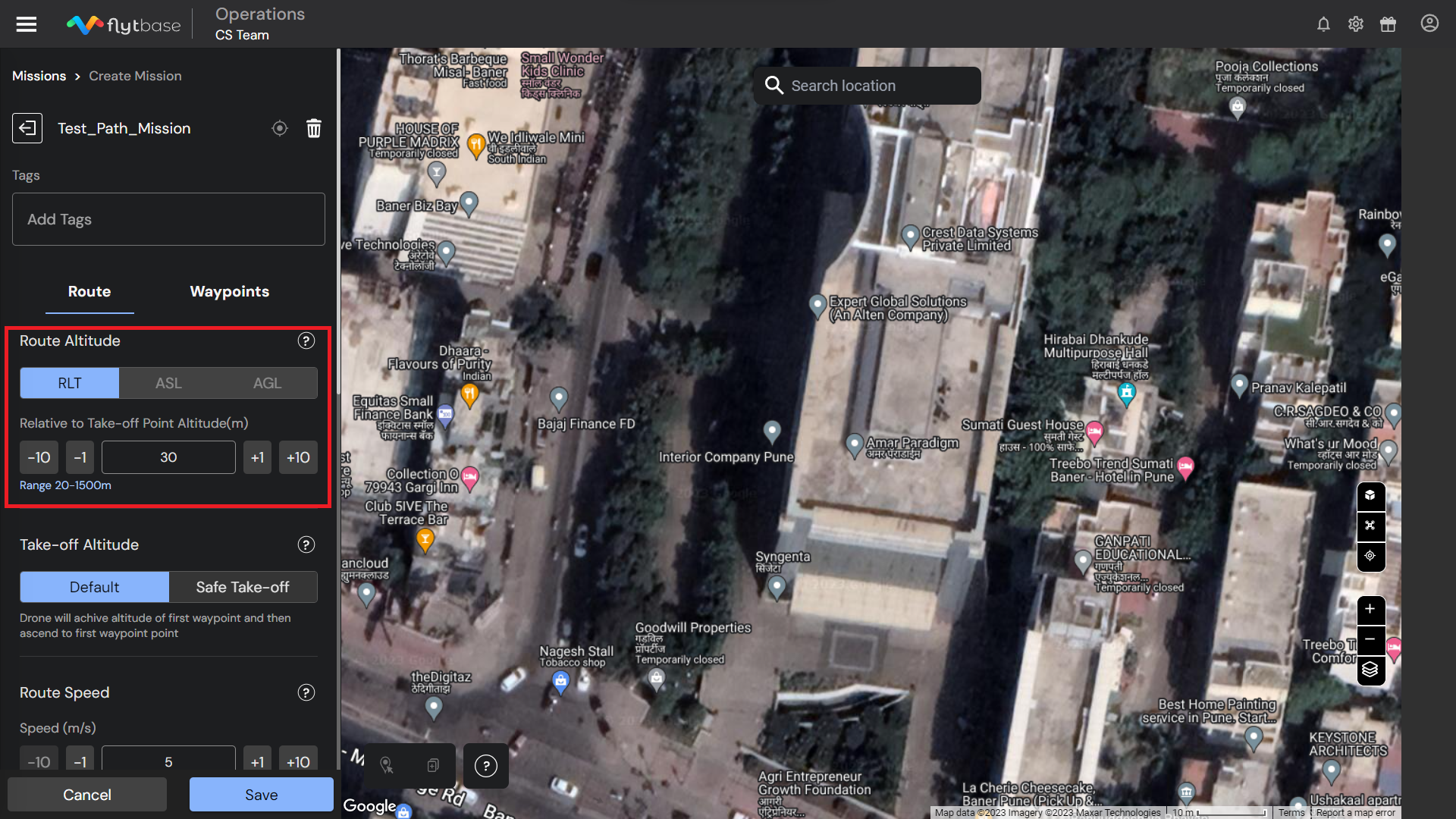
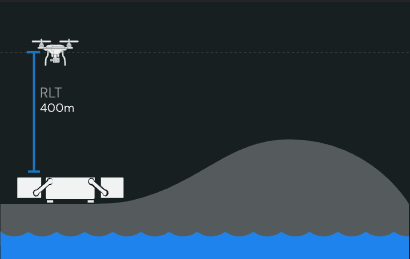
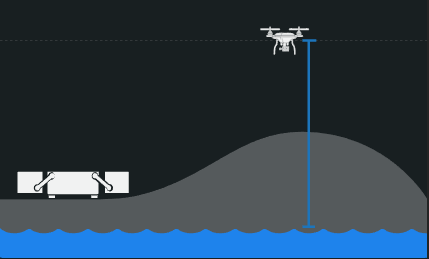
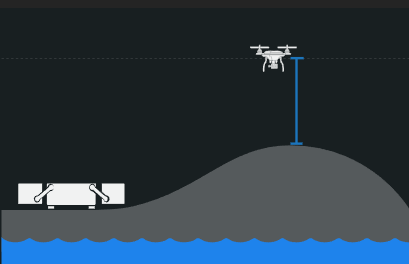
- Relative Take-off Point (RTL) : L’altitude est définie relativement au Reference Take-off Point marqué sur la carte pendant la planification. Une attention particulière est requise près du sol sur un terrain irrégulier; l’altitude de la route/des waypoints doit être ajustée selon la hauteur du terrain.
- Above Sea Level (ASL) : Altitude absolue du drone telle que représentée dans le modèle EGM . Utilisez ASL pour les missions nécessitant des mesures d’altitude globales, puisque la référence est le niveau de la mer.
- Above Ground Level (AGL) : Altitude définie par rapport au niveau du sol. Des données fiables d’élévation du sol sont essentielles pour utiliser cette option de façon sécuritaire. Ce mode convient pour suivre automatiquement le terrain afin de maintenir une élévation spécifique au-dessus du sol à tout point de la mission.
Actuellement, seule l’altitude RTL peut être configurée dans le dashboard.
Vous pouvez aussi définir la Route Altitude/Flight Altitude en allant à Settings → Flight Configuration → Flight Altitude. La Route altitude définie pendant la planification aura préséance sur la valeur de Flight altitude dans Settings.
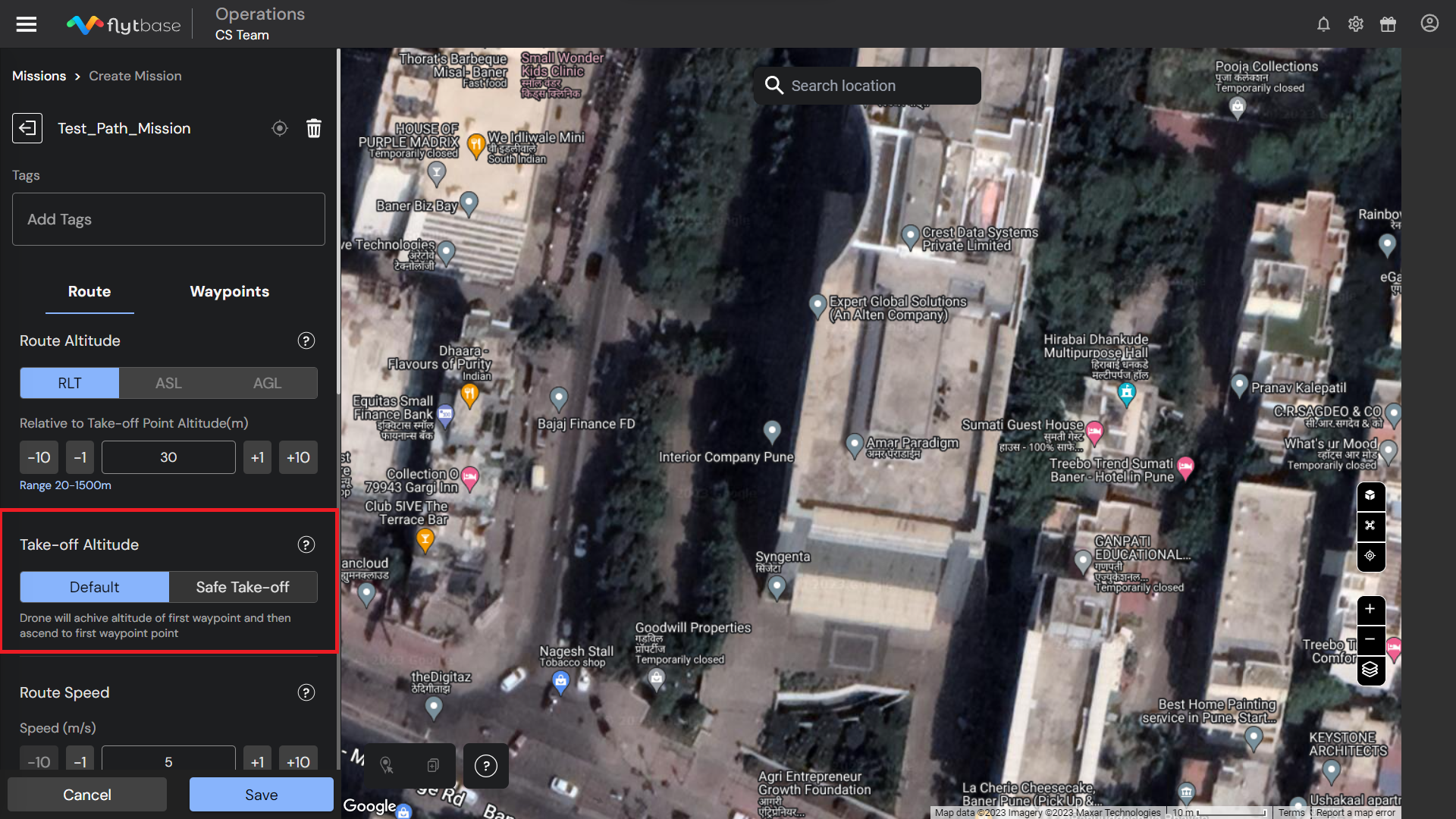
2. Take-off Altitude
Les paramètres de Take-off Altitude vous permettent de spécifier une hauteur que le drone doit atteindre au décollage afin de monter de façon sécuritaire avant de poursuivre la mission. Une fois la Take-off Altitude atteinte, le drone se déplacera en diagonale vers le premier waypoint. Il existe deux méthodes :
Vous pouvez définir une Take-off Altitude / Safe Altitude spécifique à l’appareil en allant à Devices → Device Settings → Drone Safety. La Safe Take-off Altitude définie pendant la planification aura préséance sur celle dans Device Settings.
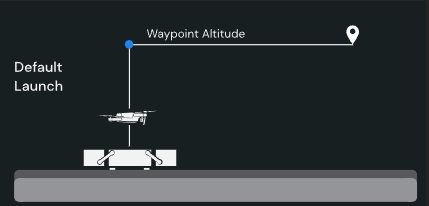
- Default Take-off Altitude : Le drone atteindra l’altitude du premier waypoint, puis s’en approchera.
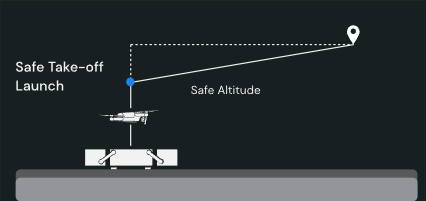
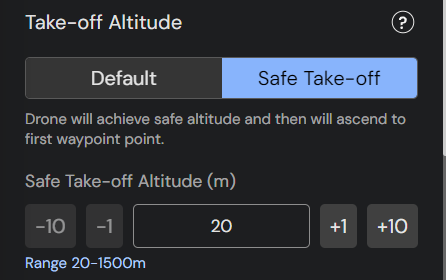
- Safe Take-off Altitude : Le drone atteindra la Safe Take-off altitude, puis se déplacera en diagonale vers le premier waypoint.
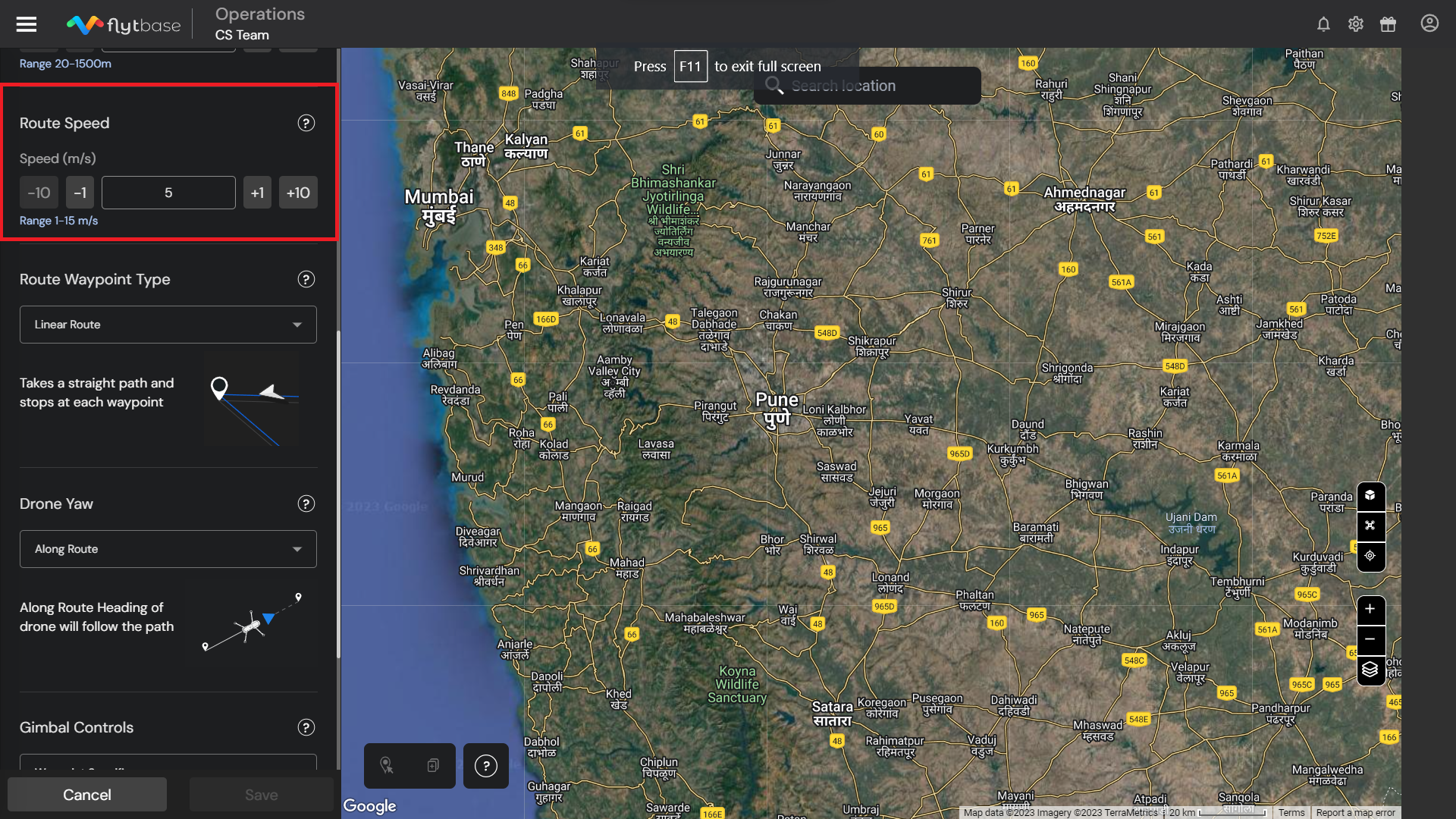
3. Route Speed
La vitesse définie ici sera la vitesse par défaut d’exécution de la mission. Toutefois, si une vitesse différente est requise entre deux (ou plusieurs) waypoints, elle peut être configurée dans les paramètres propres à un waypoint.
L’option de vitesse follow route apparaît lors de la définition des waypoints. Consultez la documentation suivante pour en savoir plus.
4. Route Waypoint Type
Ce paramètre détermine comment le drone abordera chaque waypoint et, par conséquent, l’apparence du trajet. Cinq options sont disponibles :
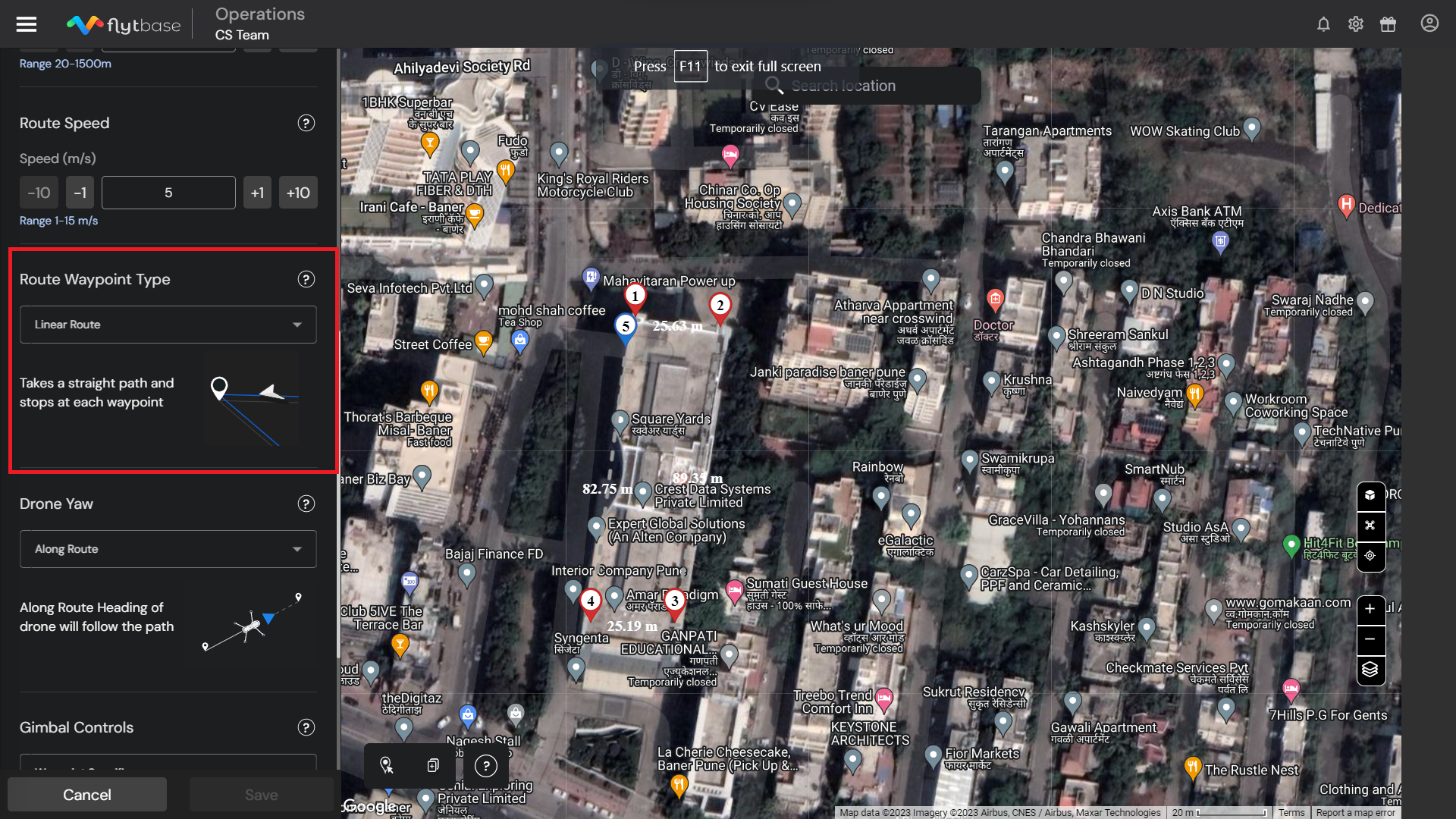
- Linear Route : Le drone suit une trajectoire droite et s’arrête à chaque waypoint.
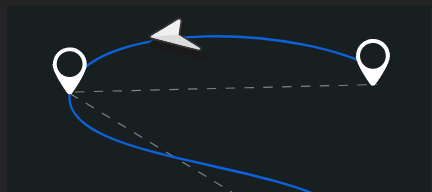
- Transit before Waypoint : Le drone suit une trajectoire courbe avant d’atteindre chaque waypoint et le traverse sans s’arrêter.

- Curved path, stops at waypoint : Le drone suit une trajectoire courbe et s’arrête à chaque waypoint.
- Curved path, moves smoothly : Le drone suit une trajectoire courbe et se déplace à vitesse constante sans s’arrêter à aucun waypoint.
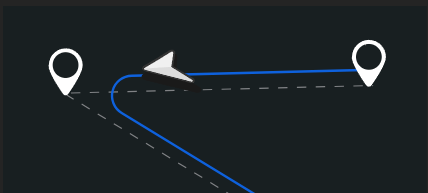
- Controlled radius : Le drone amorce le virage avant le waypoint courant de façon à respecter le rayon contrôlé.
Caution
Le drone n’exécutera les waypoint actions que sur les routes où il atteint réellement le waypoint. Cela inclut les routes linear, curved with stops et curved with smooth movement.
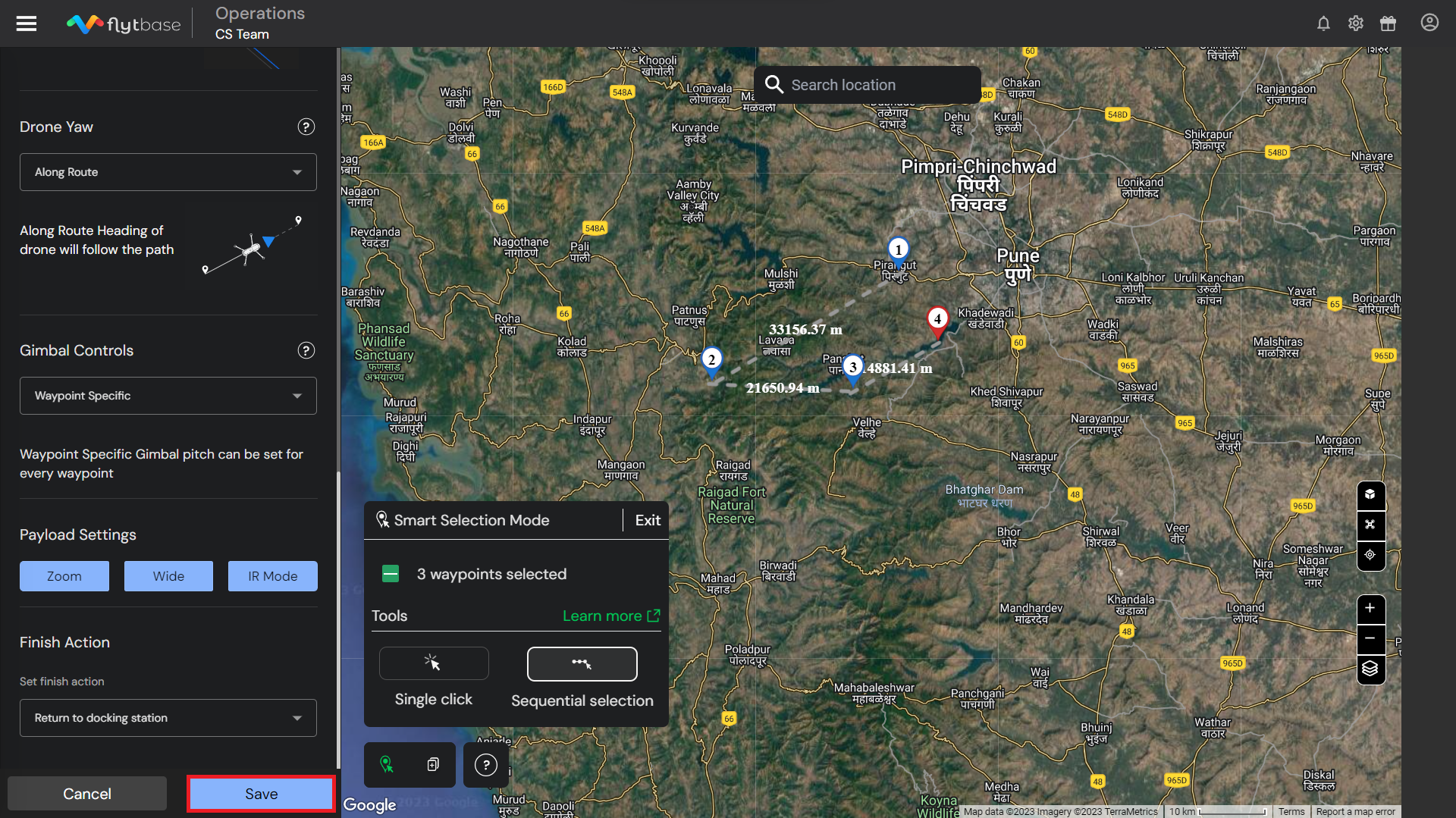
5. Drone Yaw
Vous pouvez choisir parmi les modes Drone Yaw suivants pendant le vol entre les waypoints :
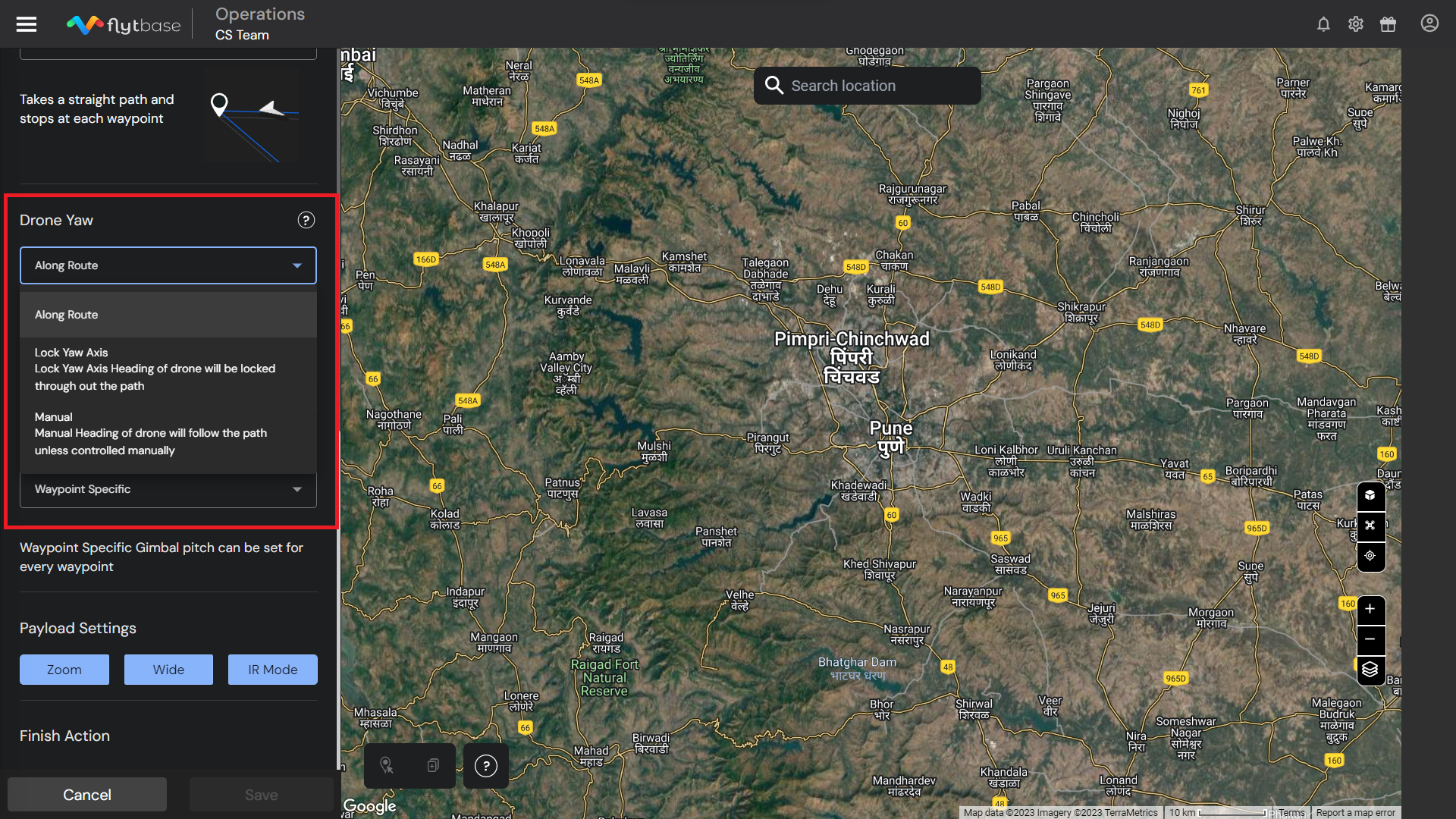
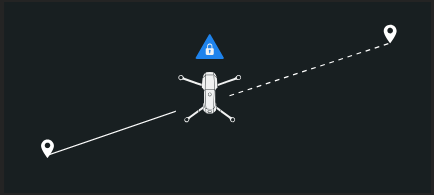
- Along Route : Le cap du drone correspond au trajet après chaque waypoint. Le yaw est réinitialisé en quittant le waypoint pour correspondre à celui du chemin.
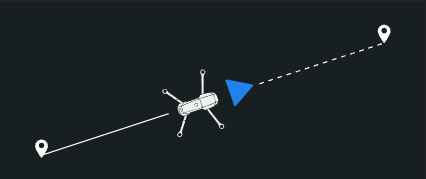
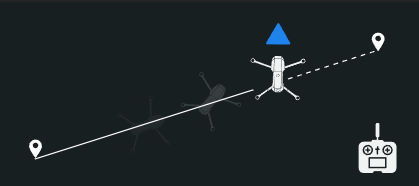
- Lock Yaw Axis : Le cap du drone est verrouillé à la dernière position du waypoint précédent et conserve cet angle en se dirigeant vers le waypoint suivant.
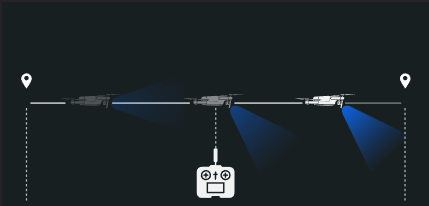
- Manual : Par défaut, le cap s’aligne vers le waypoint suivant, sauf s’il est modifié via la télécommande.
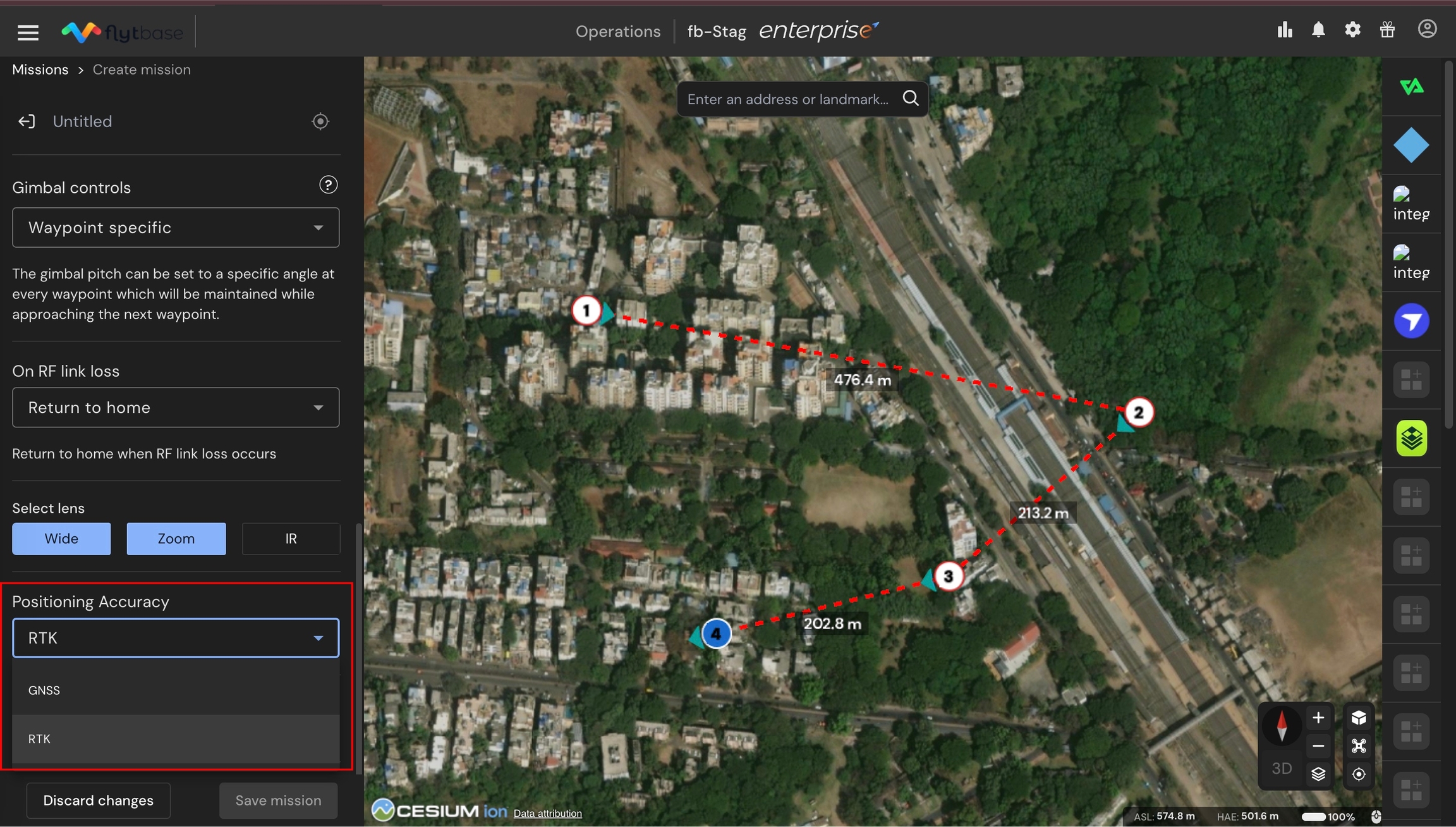
6. Gimbal / Payload Control
Vous pouvez choisir parmi les modes suivants pour le gimbal pitch pendant le vol entre les waypoints :
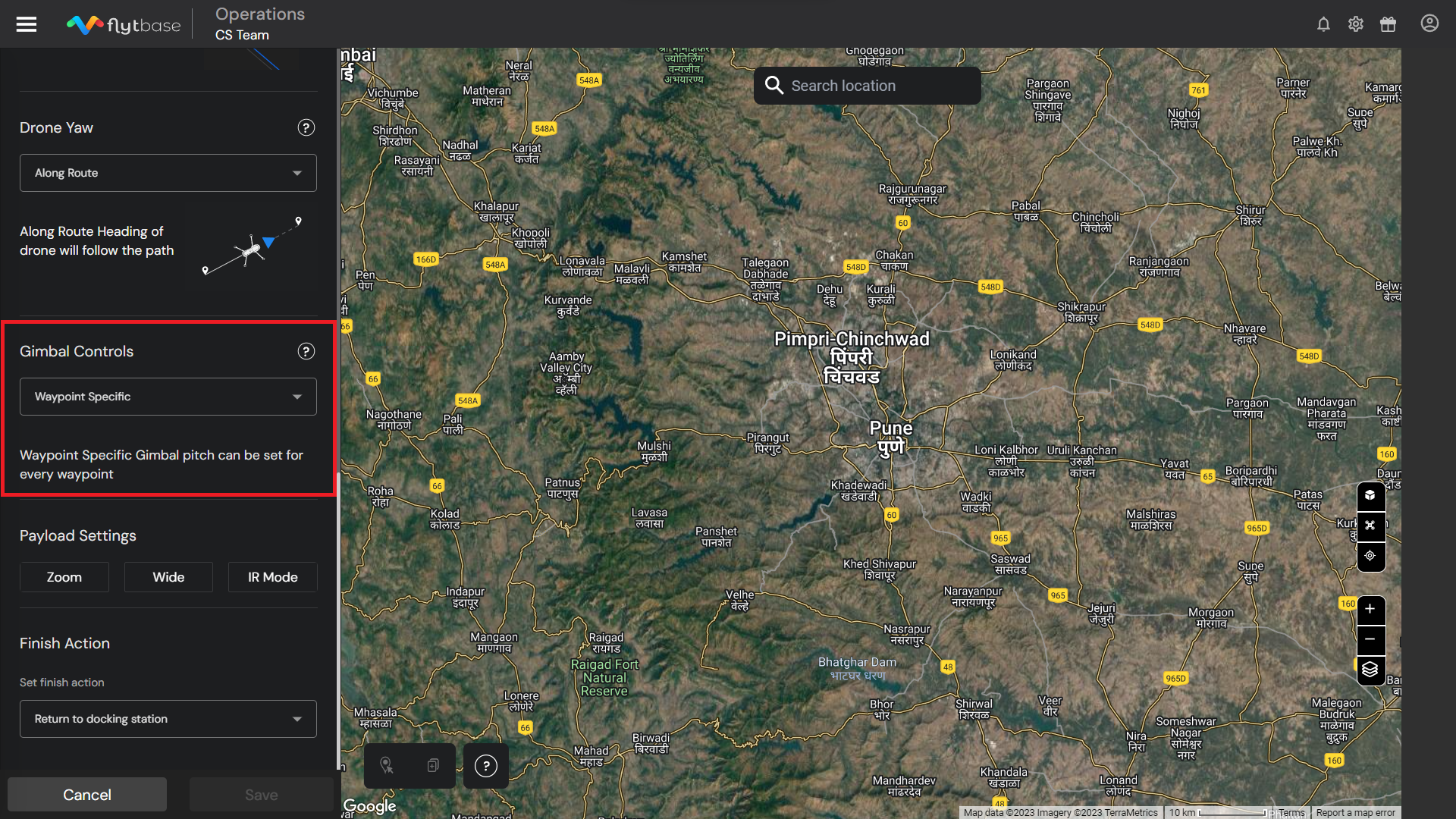
- Waypoint specific : Le gimbal pitch peut être défini pour chaque waypoint afin d’aborder le waypoint suivant. Après avoir effectué toutes les waypoint actions, le drone réinitialisera son gimbal à l’angle spécifié.

- Manual : Le gimbal conserve la dernière position du waypoint précédent, sauf s’il est modifié via la télécommande.
7. Payload Settings
Vous pouvez sélectionner les capteurs d’imagerie à utiliser pendant la mission parmi les options suivantes :
- Zoom
- Wide
- IR Mode / Thermal Mode
Consultez la documentation suivante pour en savoir plus sur payload controls. Payload Controls
8. Positioning Accuracy
Voici les différentes options de Positioning Accuracy :
-
GNSS : S’appuie uniquement sur le positionnement satellite pour guider le drone. Convient aux opérations où une précision au centimètre n’est pas critique. Plage de précision :
- Horizontal : ± 1.5 m
- Vertical : ± 0.5 m
-
RTK : Bascule vers des corrections Real‑Time Kinematic pour une navigation ultra précise. Recommandé pour les applications nécessitant un maintien en position ultra précis (p. ex. inspections haute résolution ou cartographie) où le drone doit rester exactement à un point fixe. Plage de précision :
- Horizontal : ± 0.1 m
- Vertical : ± 0.1 m
9. Finish Action
Choisissez l’action de fin lorsque le drone atteint le dernier waypoint de la mission. Voici les finish actions disponibles :
- Return to Home (RTH) : Le drone retourne à la station d’accueil.
- Exit Mission and Hover : Le drone demeure en vol stationnaire au dernier waypoint.
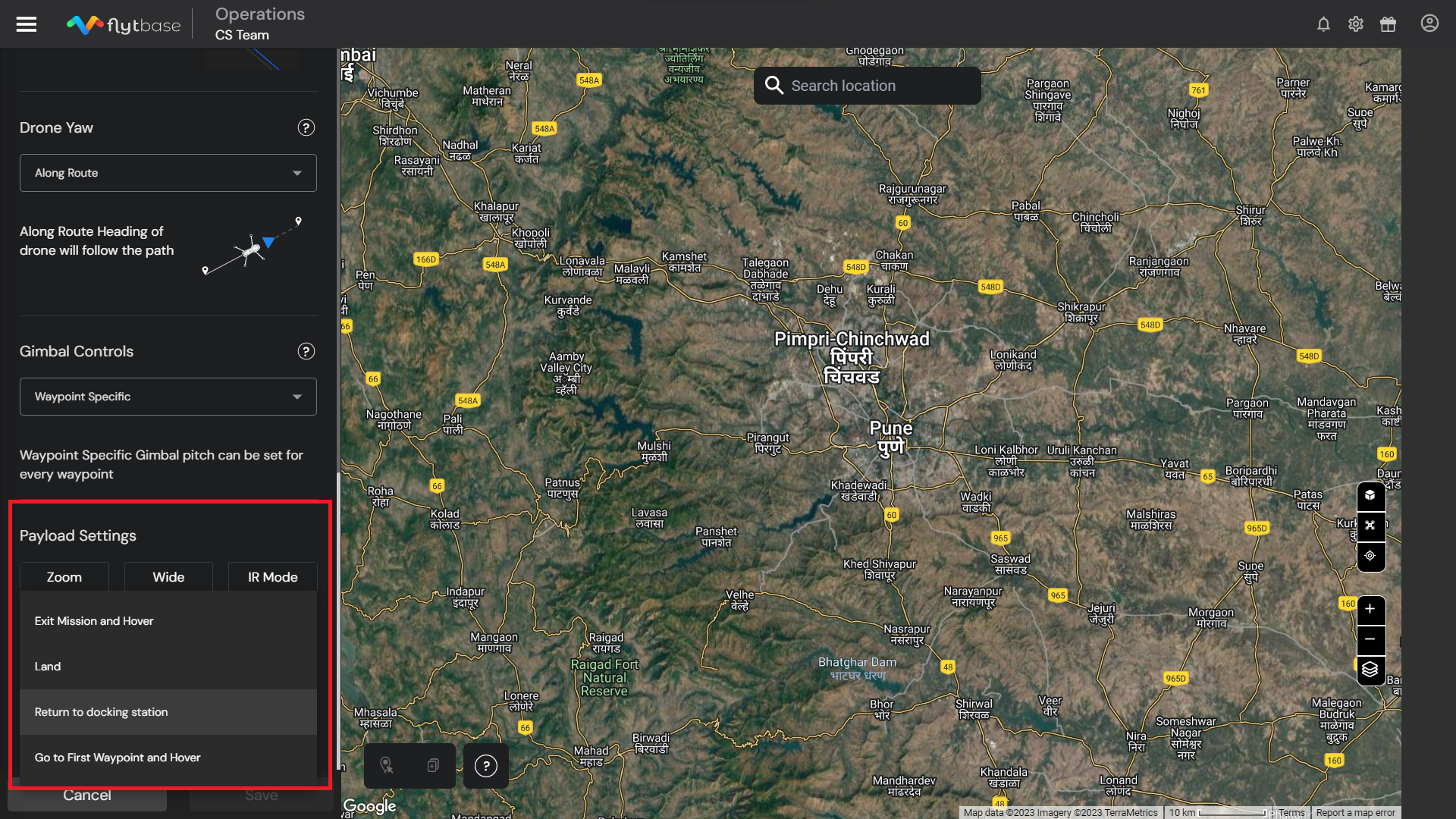
- Go to First Waypoint and Hover : Le drone se déplace vers le premier waypoint et commence à effectuer un vol stationnaire.
Warning
Si l’opérateur utilise une configuration Drone-in-a-Box, il est fortement recommandé de définir la Mission Finish Action à Return to Home (RTH).
Pour configurer les Waypoint parameters, veuillez consulter le link suivant.
Configuring Waypoint Parameters
- Assurez-vous d’avoir ajouté des waypoints sur la carte.
Planifiez efficacement la mission par trajet en utilisant les options suivantes :
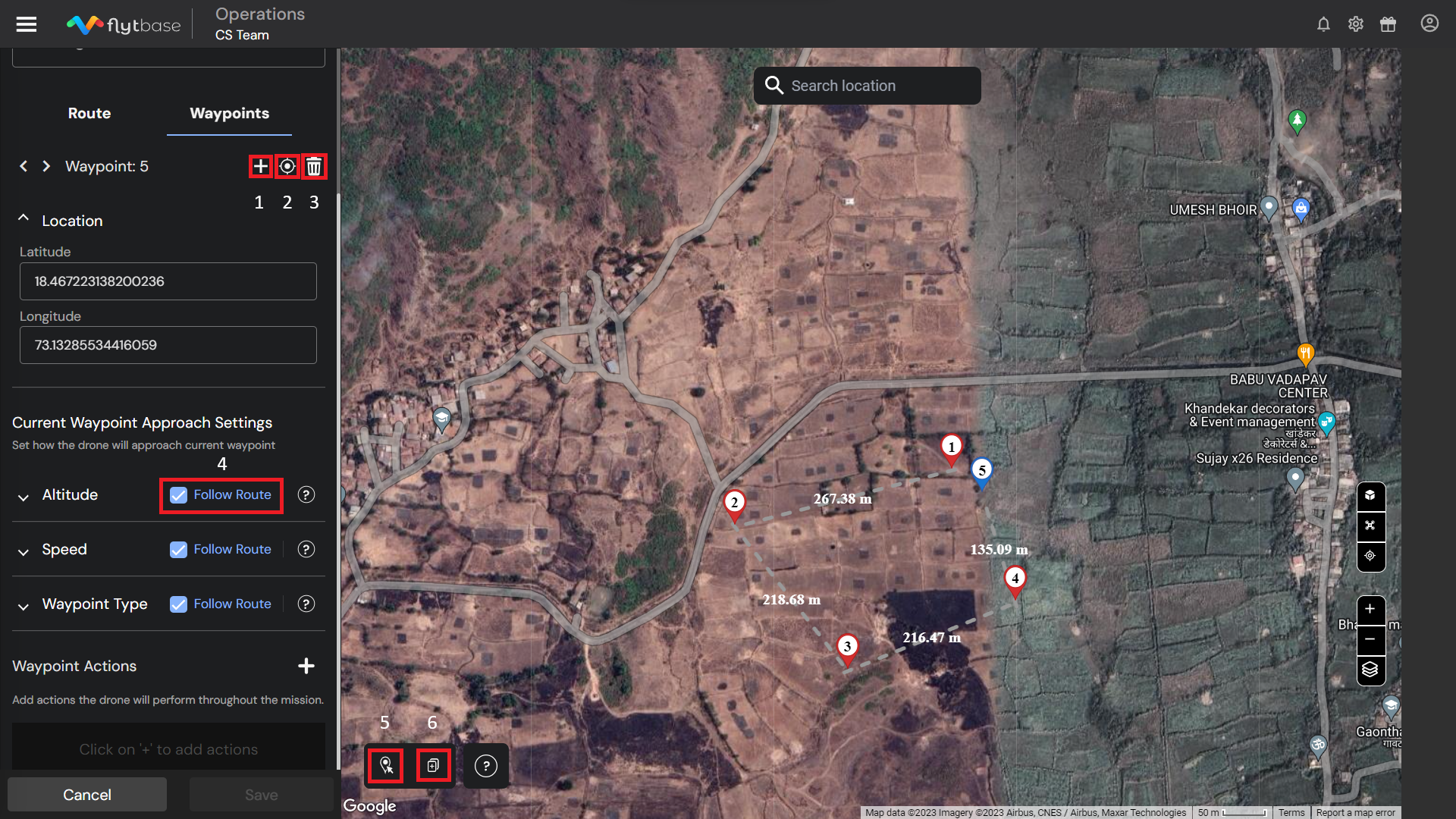
- Add Waypoint : Pour insérer un nouveau waypoint avant celui sélectionné, cliquez sur l’icône

- Recenter Waypoint : Pour recentrer la carte sur l’emplacement du waypoint, utilisez l’icône Recenter

-
Delete Waypoint : Cliquez sur l’icône
 pour supprimer le waypoint sélectionné.
pour supprimer le waypoint sélectionné. -
Follow Route : Cochez la case pour utiliser les paramètres par défaut d’altitude, de vitesse et de type de waypoint pour un waypoint, ou décochez-la pour définir des valeurs personnalisées.
-
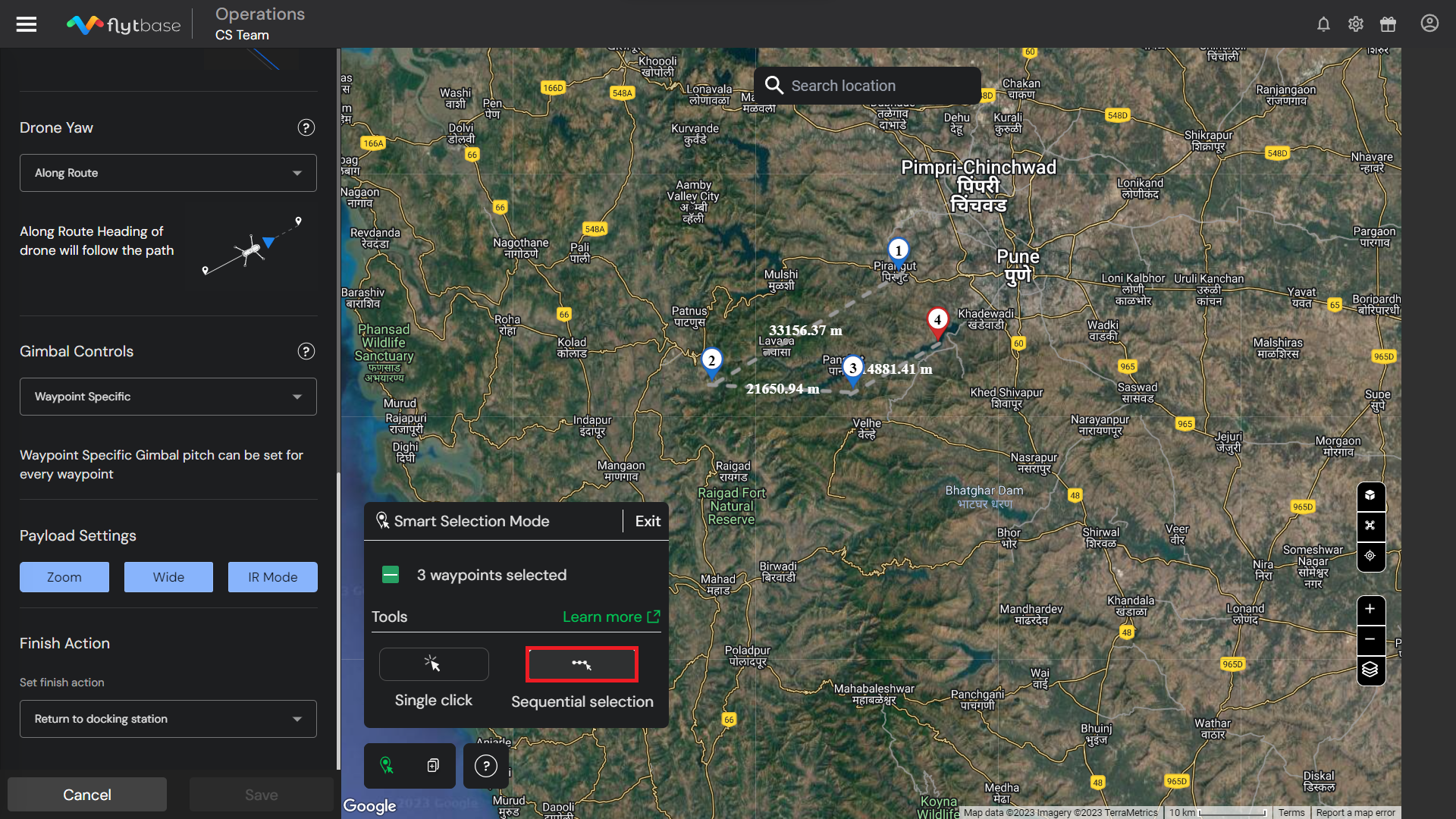
Smart Selection Mode : En cliquant sur l’icône
 vous activez Smart Selection Mode, qui permet de sélectionner plusieurs waypoints et de configurer leurs paramètres en une seule fois. Cela peut se faire au moyen de l’outil Single Click ou Sequential Selection.
vous activez Smart Selection Mode, qui permet de sélectionner plusieurs waypoints et de configurer leurs paramètres en une seule fois. Cela peut se faire au moyen de l’outil Single Click ou Sequential Selection.-
Single click : L’opérateur peut cliquer sur le bouton
 pour sélectionner au hasard plusieurs waypoints au besoin, puis personnaliser simultanément les waypoint actions, la vitesse, l’altitude et le rayon.
pour sélectionner au hasard plusieurs waypoints au besoin, puis personnaliser simultanément les waypoint actions, la vitesse, l’altitude et le rayon. -
Sequential selection : L’opérateur peut cliquer sur le bouton
 pour sélectionner plusieurs waypoints en séquence. Sélectionnez d’abord le premier et le dernier waypoint; tous les waypoints entre les deux seront automatiquement sélectionnés. Cette fonctionnalité permet de personnaliser efficacement plusieurs waypoints à la fois.
pour sélectionner plusieurs waypoints en séquence. Sélectionnez d’abord le premier et le dernier waypoint; tous les waypoints entre les deux seront automatiquement sélectionnés. Cette fonctionnalité permet de personnaliser efficacement plusieurs waypoints à la fois.
-
Info
Lorsque vous utilisez Smart Selection Mode, si vous passez de l’outil Single click à l’outil Sequential selection, le prochain waypoint sélectionné sera automatiquement défini comme premier waypoint de la séquence.
- Copy previous waypoint settings : L’opérateur peut configurer les paramètres d’un waypoint, puis activer Copy previous waypoint settings en cliquant sur l’icône

Current Waypoint Approach Settings
- Waypoint Altitude : Le drone s’ajuste à l’altitude définie à chaque waypoint et la maintient jusqu’au prochain.
- Waypoint Speed : Le drone ajuste sa vitesse à la valeur définie à chaque waypoint et la maintient jusqu’au prochain.
- Waypoint Type : Le déplacement du drone à travers chaque waypoint est déterminé par le type présélectionné.
Waypoint Actions
À chaque waypoint, plusieurs waypoint actions peuvent être exécutées. Voici celles disponibles :
-
Drone
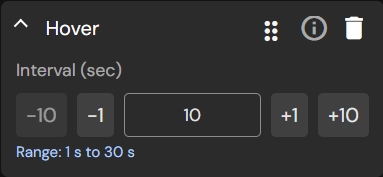
- Hover : Définissez la durée de vol stationnaire au waypoint courant.
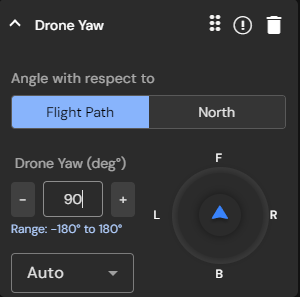
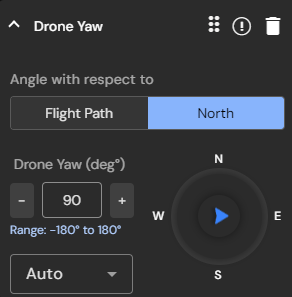
- Drone Yaw : Permet de définir l’angle de yaw du drone pour le waypoint courant. Vous pouvez configurer le yaw relativement à la trajectoire de vol ou à True North. Vous pouvez aussi choisir si le drone doit tourner dans le sens horaire, antihoraire, ou laisser le système déterminer automatiquement la direction pour atteindre l’angle demandé.
-
Gimbal
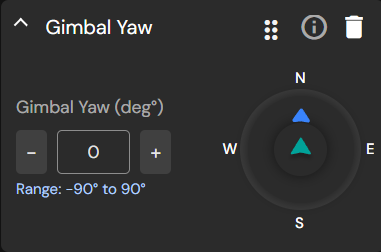
- Gimbal Yaw : Définissez l’angle de yaw du gimbal pendant la mission.
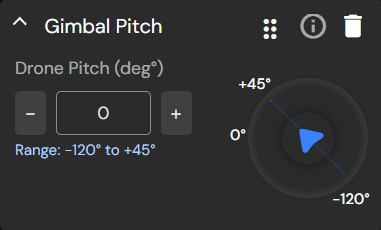
- Gimbal Pitch : Définissez l’angle de pitch du gimbal pendant la mission.
-
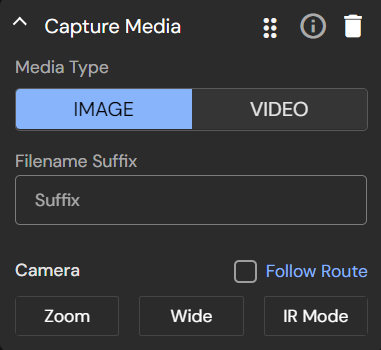
Camera
- Capture Media : Configurez la capture d’images ou le démarrage de l’enregistrement vidéo, et l’enregistrement de vos fichiers média. Au besoin, choisissez aussi des capteurs d’imagerie spécifiques au waypoint.
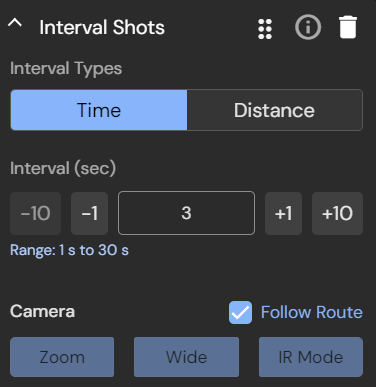
- Interval Shots : Prenez des images de façon répétée après une distance ou un temps fixe.
- Camera Zoom : Sert à définir le zoom de la caméra du drone pour le waypoint courant.

- Stop recording : Définissez quand arrêter l’enregistrement vidéo.
- Stop Interval Shots : Définissez quand arrêter les prises à intervalle.
Warning
Les waypoint actions ne seront pas exécutées au dernier waypoint.
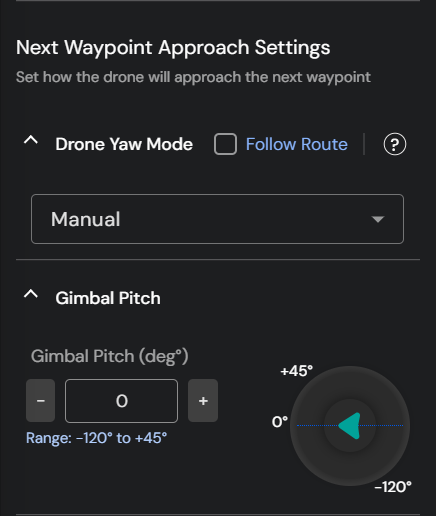
Next Waypoint Approach Settings
Ces paramètres contrôlent l’orientation du drone et de la charge utile d’imagerie pendant le vol vers le prochain waypoint.
-
Drone Yaw Mode : Le yaw peut être défini sur la valeur par défaut (Follow the route) ou une valeur personnalisée parmi :
- Along Route : le cap du drone est toujours aligné sur la trajectoire entre les waypoints.
- Manual : le drone maintient son yaw le long de la route jusqu’à ce qu’une entrée soit reçue de la télécommande.
- Lock Yaw axis : le yaw est verrouillé à l’orientation du waypoint précédent.
- Auto Adjust : si le réglage de yaw de deux waypoints diffère, le drone effectue une transition progressive entre les orientations pendant le trajet.
-
Gimbal pitch : Définissez ici l’angle de pitch requis pour la charge utile d’imagerie.
Warning
Les Next Waypoint Approach settings ne peuvent pas être appliqués à tous les points sélectionnés avec les outils Smart Selection.
- L’outil Copy previous waypoint settings applique les Current et Next Waypoint Approach settings à tous les points créés à l’aide de l’outil.
- Une fois tous les paramètres définis, cliquez sur Save Mission. La mission apparaîtra ensuite dans l’onglet Missions du dashboard FlytBase.
Pour apprendre à planifier une Grid Mission, consultez la documentation suivante. Grid Mission