Home > Modules pré-vol > Grid Mission
Grid Mission
Guide sur la façon de planifier une Grid Mission dans FlytBase.
Une Grid Mission consiste en une série de trajectoires de vol en lignes droites, parallèles entre elles. Ces missions sont couramment utilisées pour l’imagerie et les applications d’arpentage. FlytBase permet de créer et de modifier des Grid Missions en donnant aux utilisateurs le contrôle de paramètres comme le Ground Sampling Distance (GSD), le Front Overlap, le Side Overlap, etc.
Planifier une mission en grille
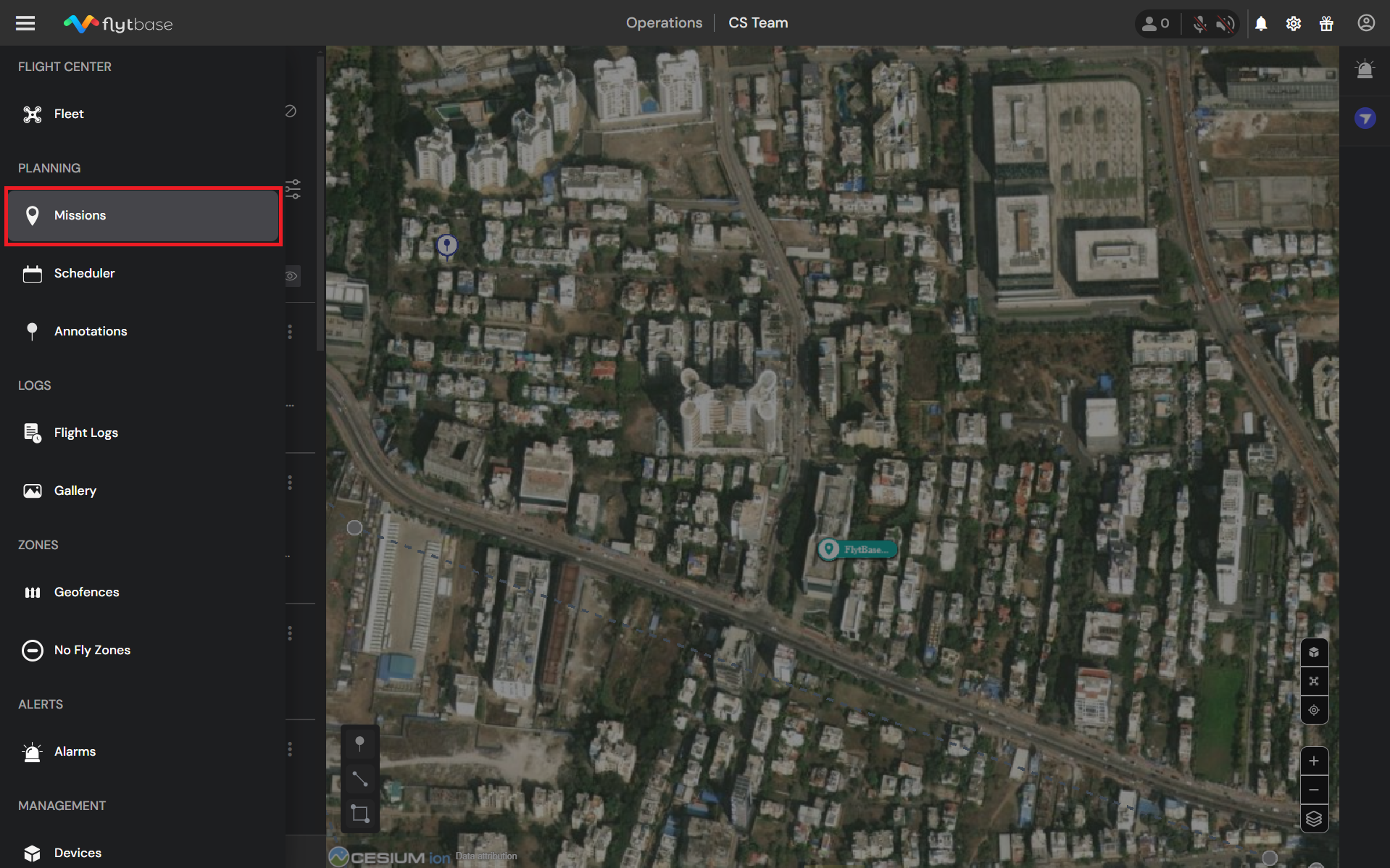
- Ouvrez le Navigation Drawer et sélectionnez l’onglet Missions sous la section Planning.
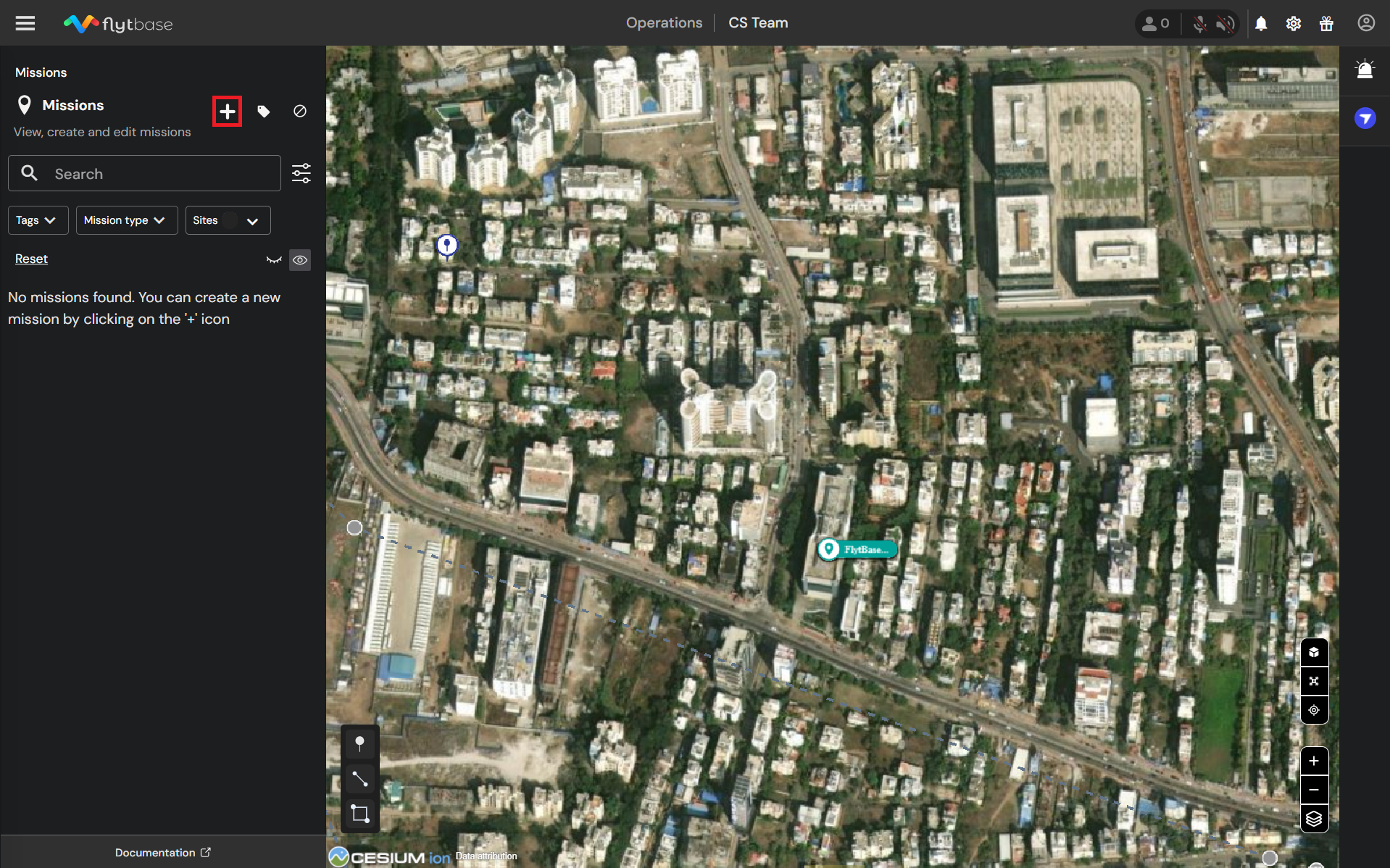
- Cliquez sur l’icône
 pour ajouter une mission.
pour ajouter une mission.
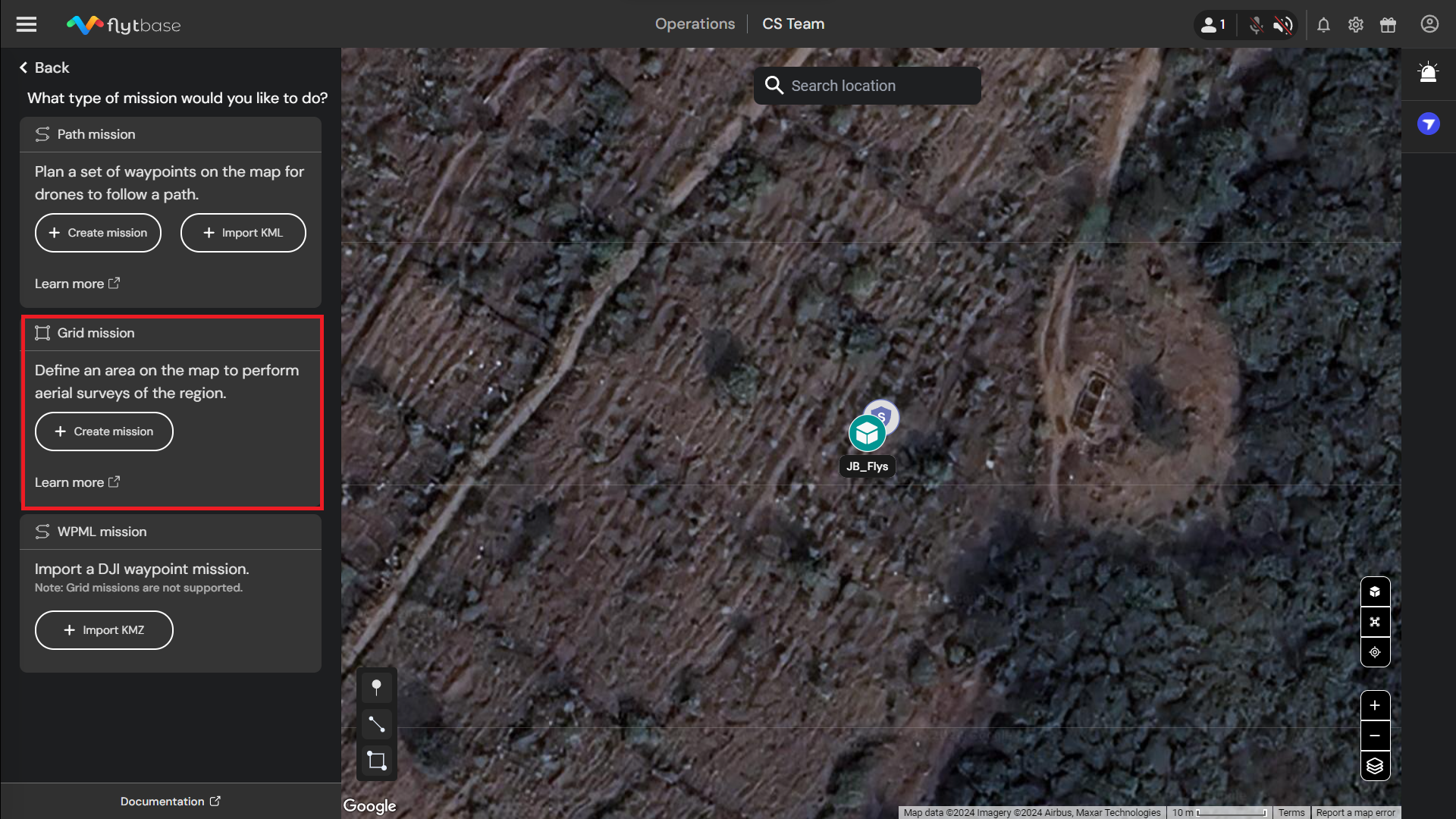
- Sous la section Grid Mission, sélectionnez Create Mission.
- Donnez un nom à la nouvelle mission.
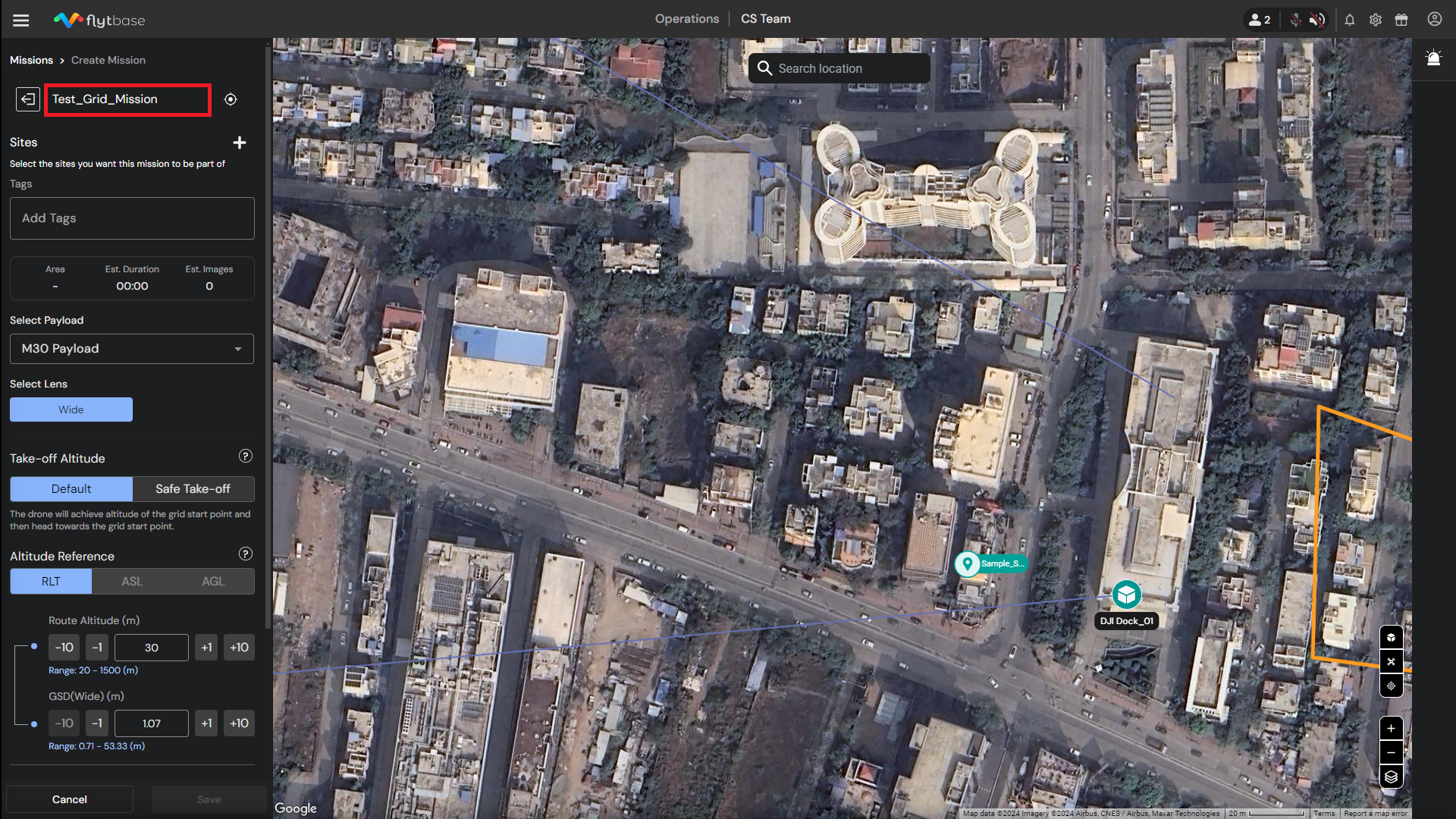
- Assignez un Site à cette mission.
Info
Vous pouvez assigner plusieurs Sites à une mission.
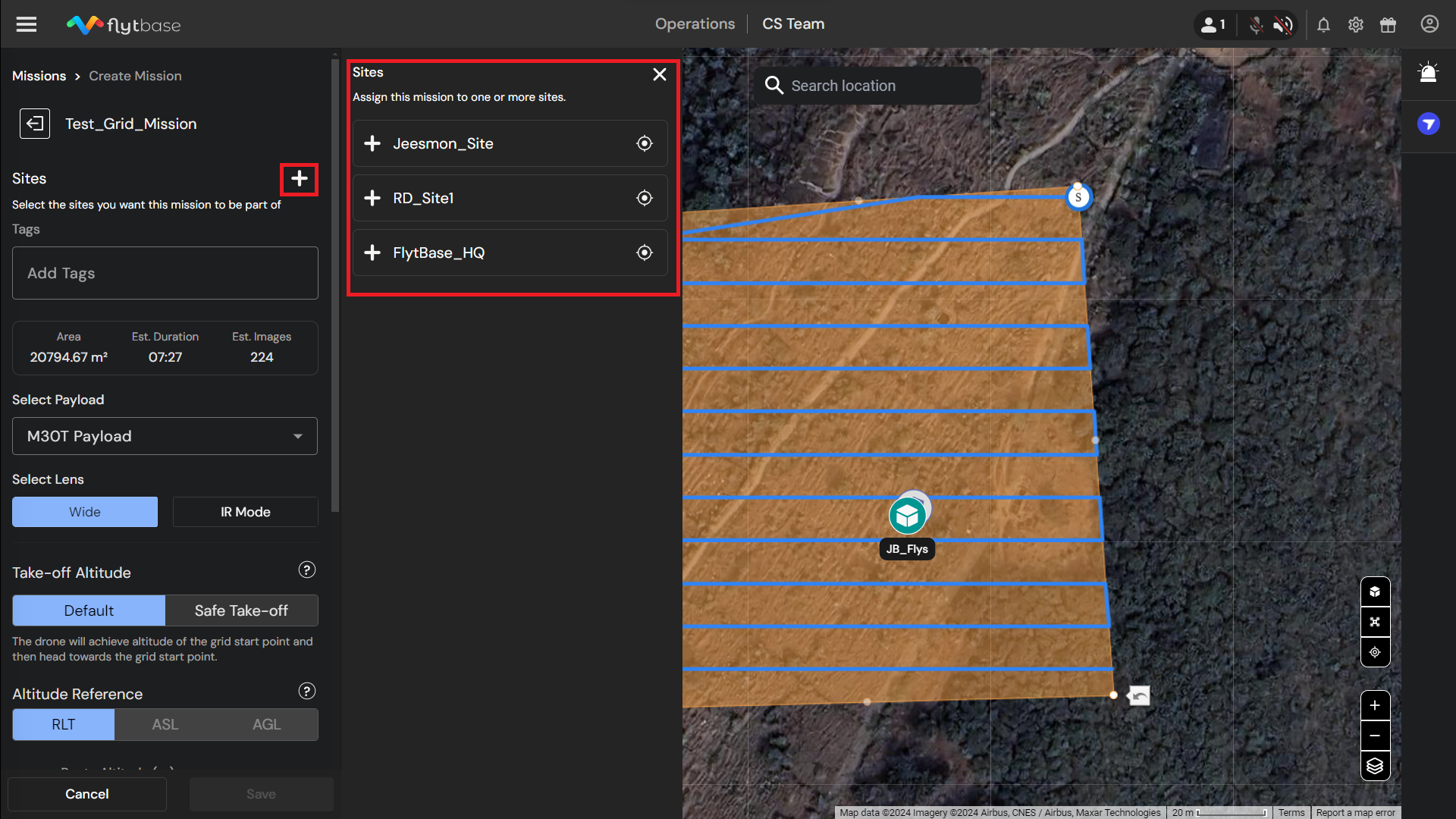
Pour en savoir plus sur les Sites, consultez la documentation suivante : Site Management
- Ajoutez des Tags à votre mission pour améliorer la gestion.
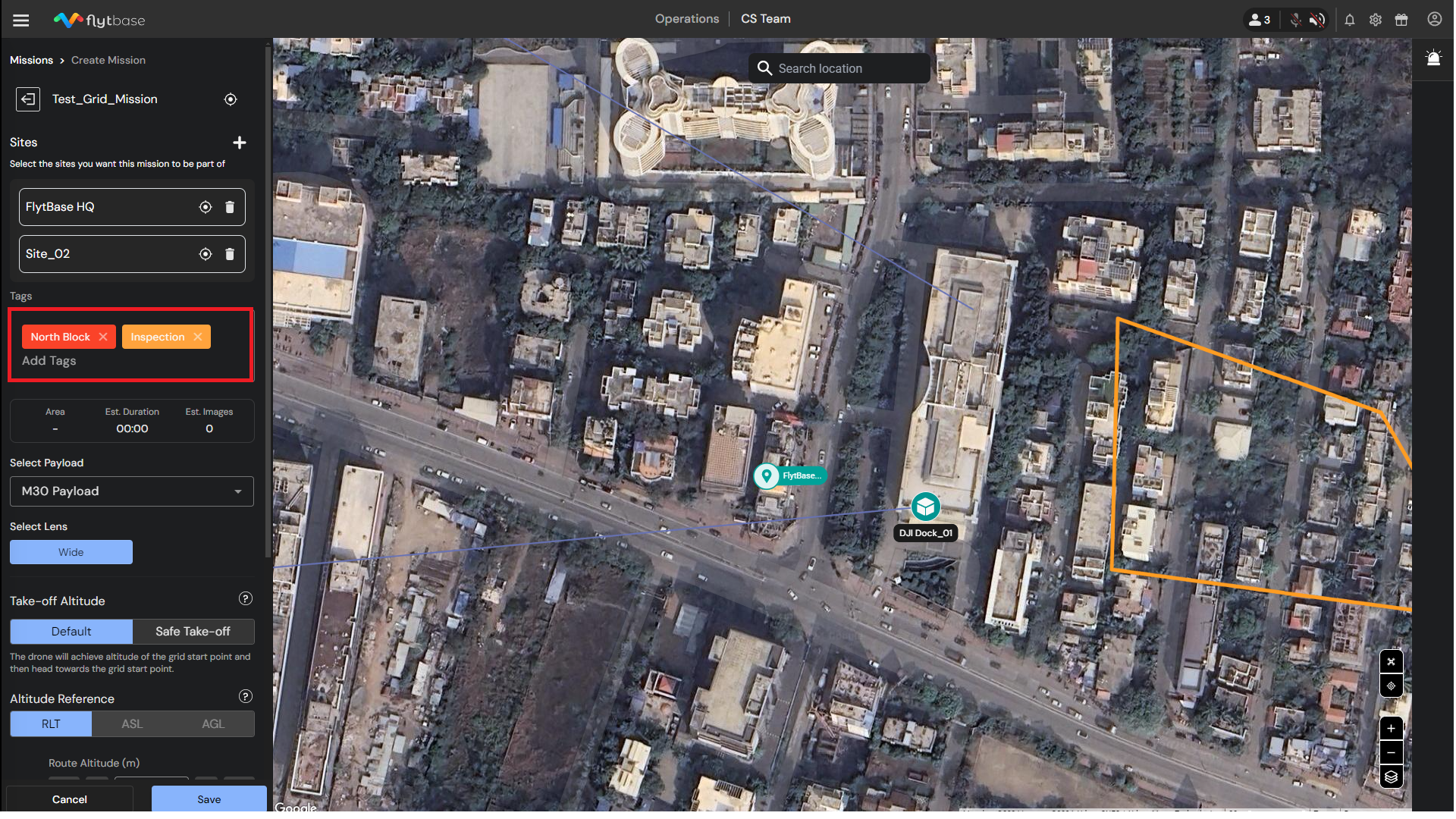
Pour en savoir plus sur Mission Management, consultez la documentation suivante : Mission Management
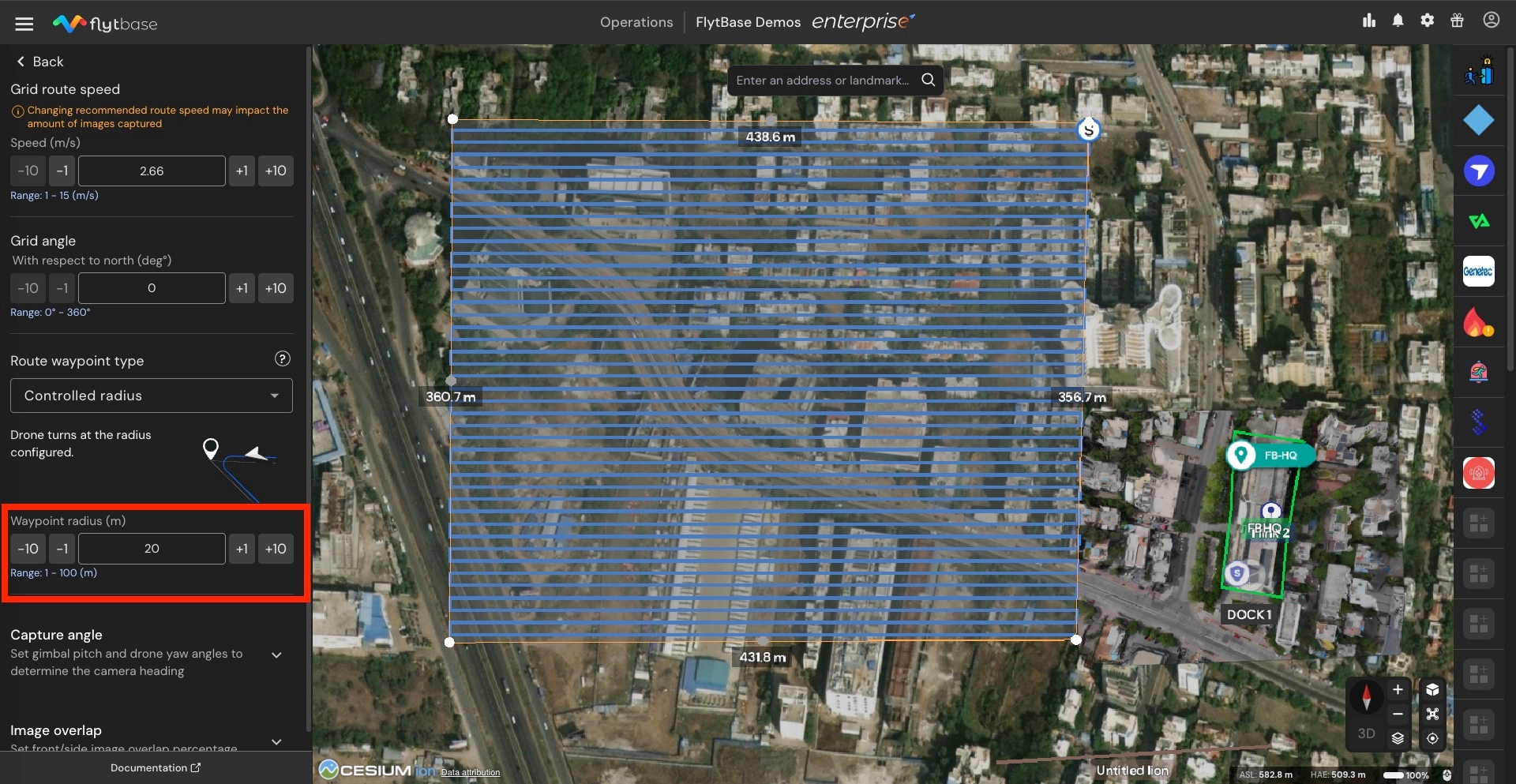
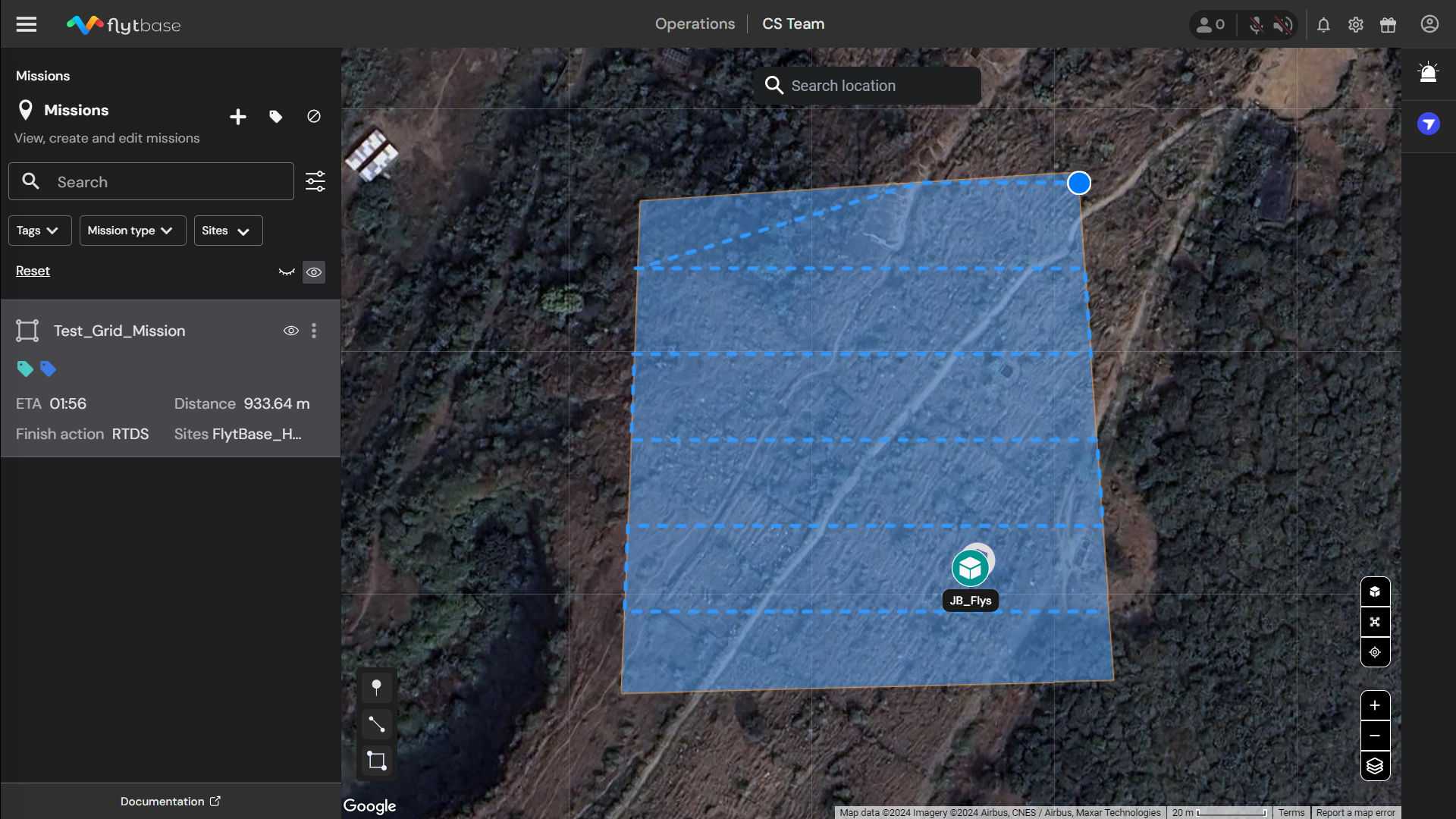
- Cliquez simplement avec le bouton gauche sur la carte pour créer une grille. Ajustez les sommets du polygone selon vos préférences. Le S annoté sur la grille représente le point de départ (Grid Start Point).
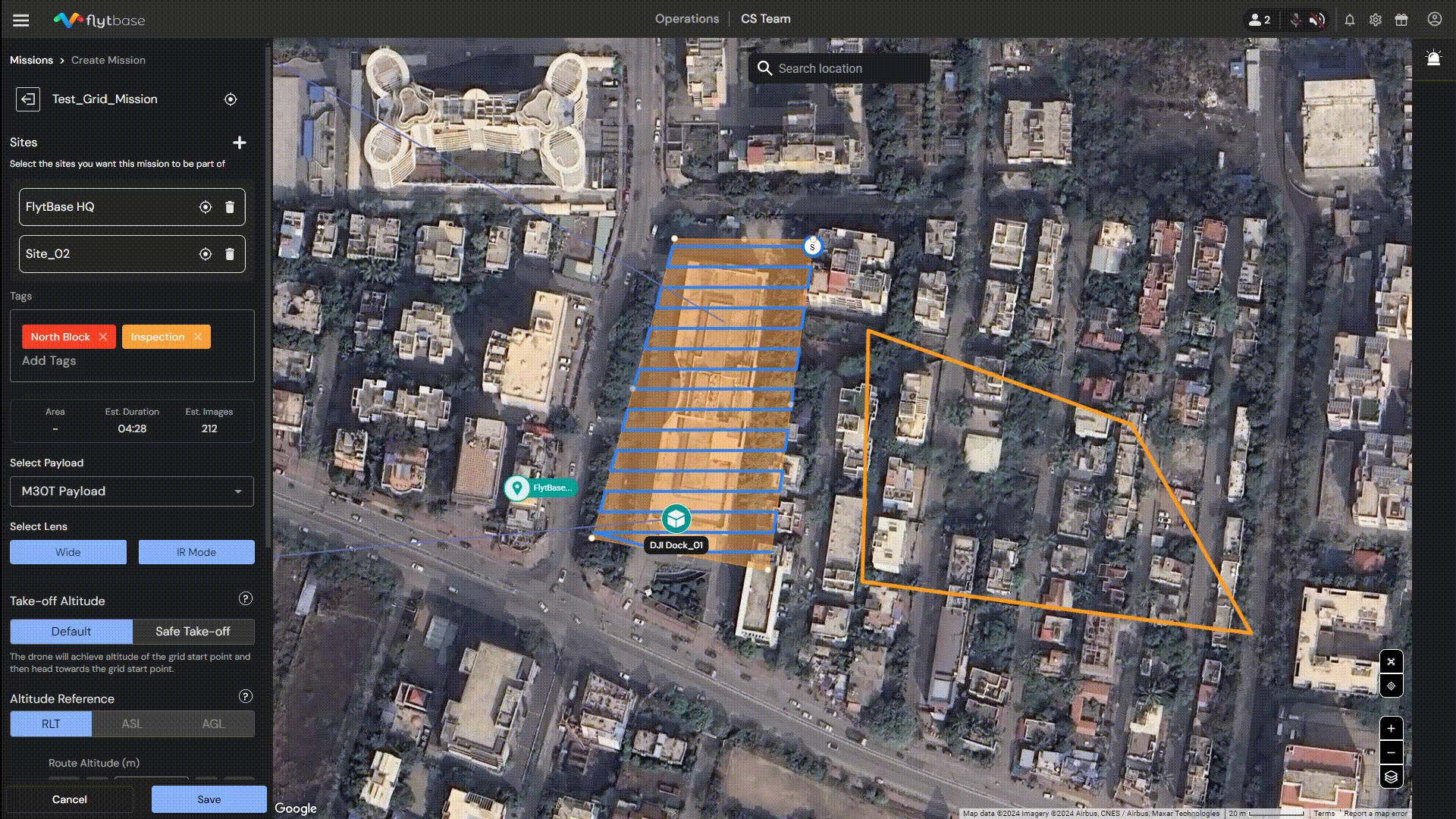
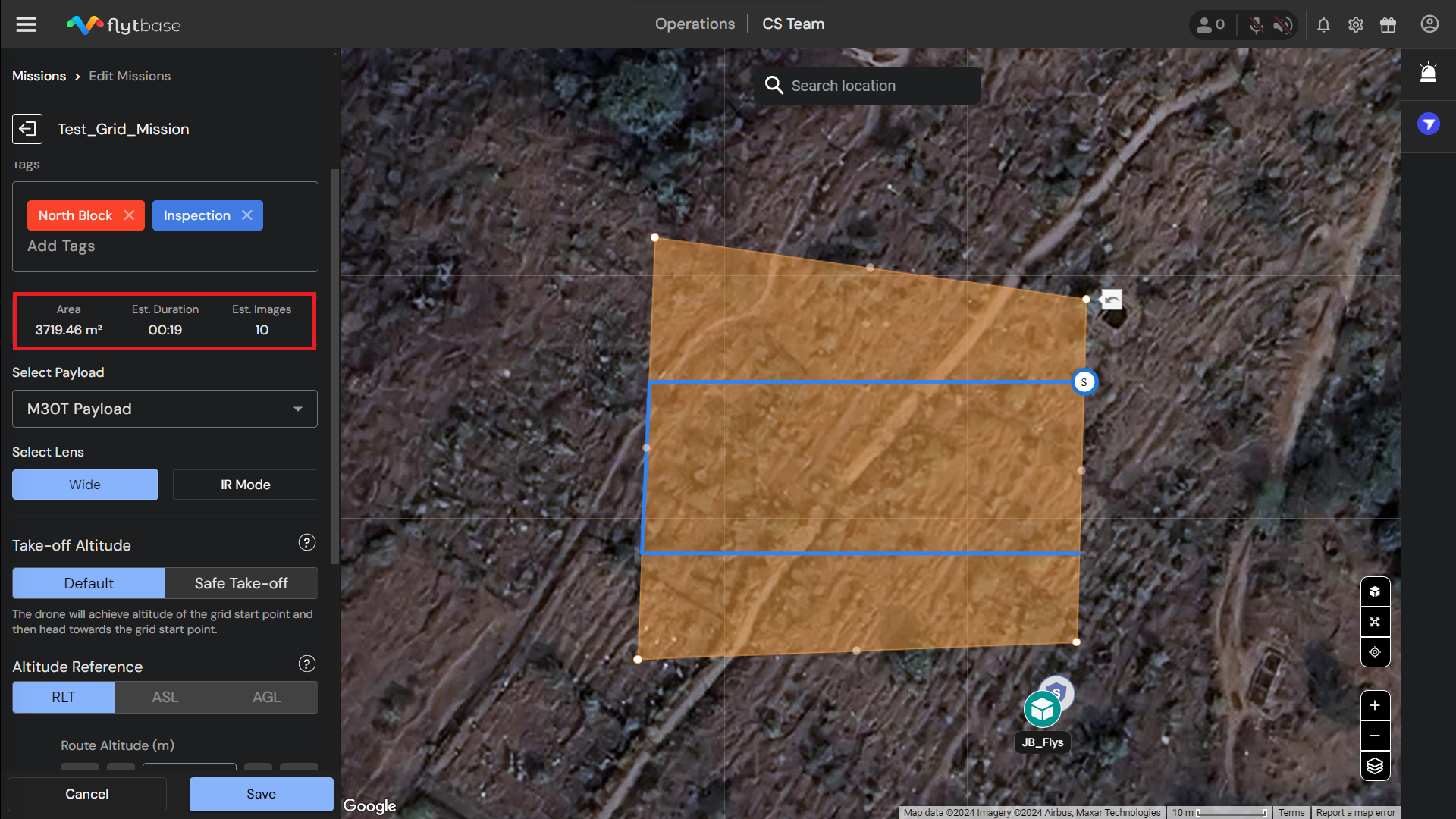
- Après la création de la grille, des détails comme la Total Area, l’Estimated Time pour terminer et l’Estimated Number of Images à prendre se trouvent sous Tags. Ces informations aident à personnaliser les paramètres de mission selon vos besoins.
Configuring Grid Mission Parameters
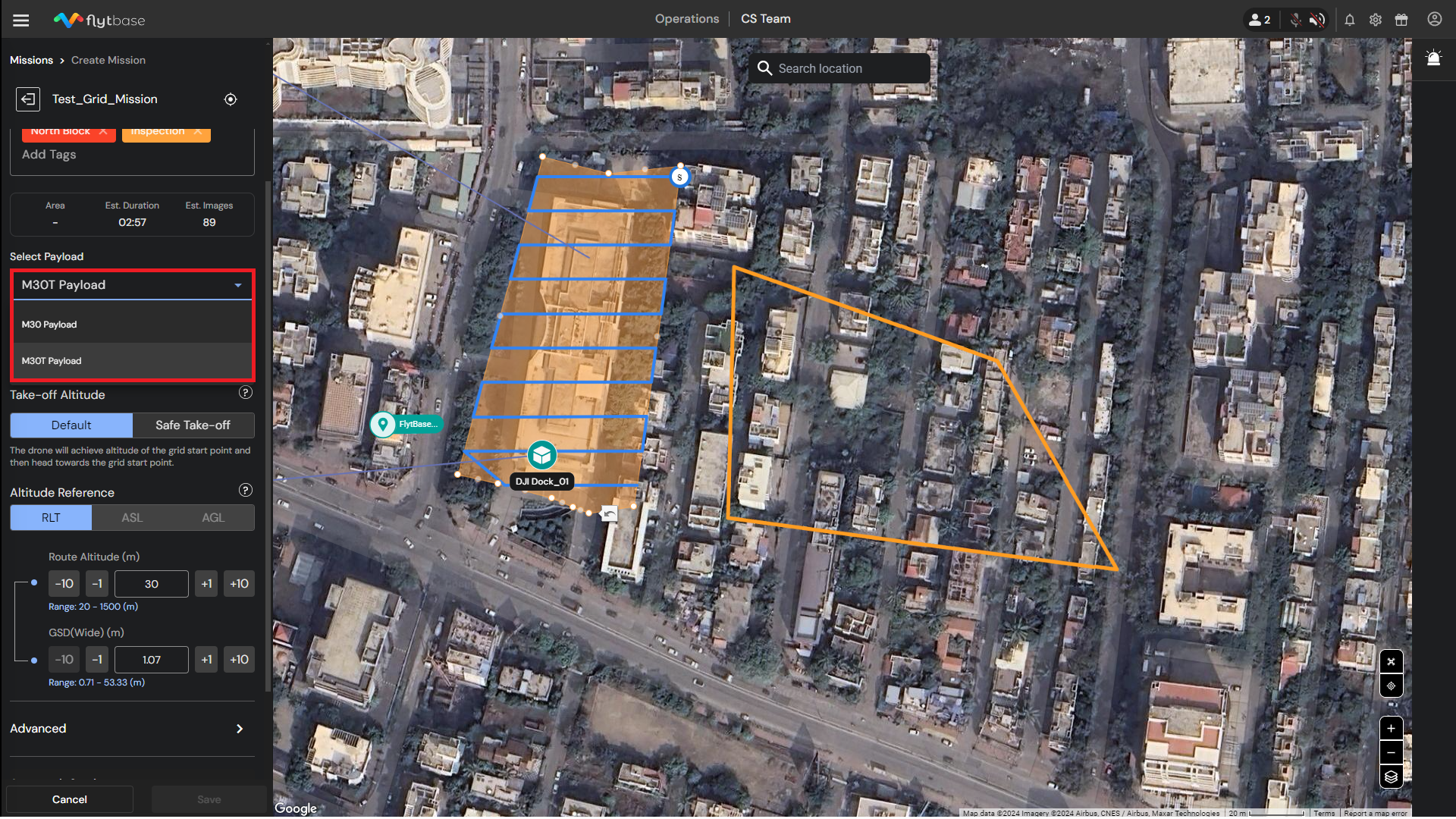
1. Select Payload
Sélectionnez la charge utile (payload) du drone à utiliser pendant la mission. Vous pouvez choisir M30 Payload ou M30T Payload selon le matériel disponible.
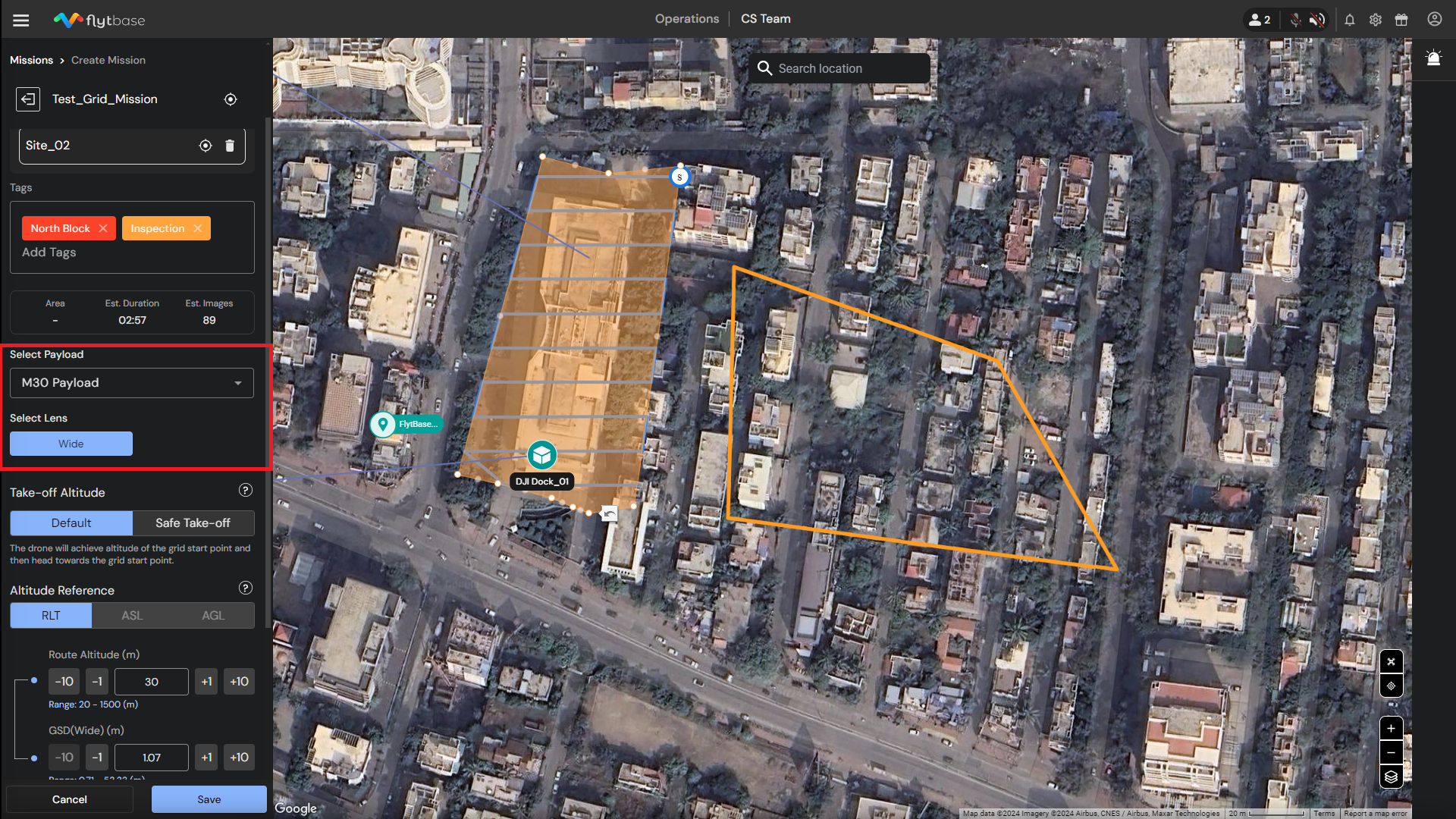
2. Select Lens (Imaging Sensor)
Selon la charge utile sélectionnée, vous pouvez maintenant choisir les capteurs d’imagerie qui seront utilisés lors de l’exécution de la mission.
- Dans le cas de M30 Payload, vous pouvez utiliser l’objectif grand-angle (Wide-Angle).
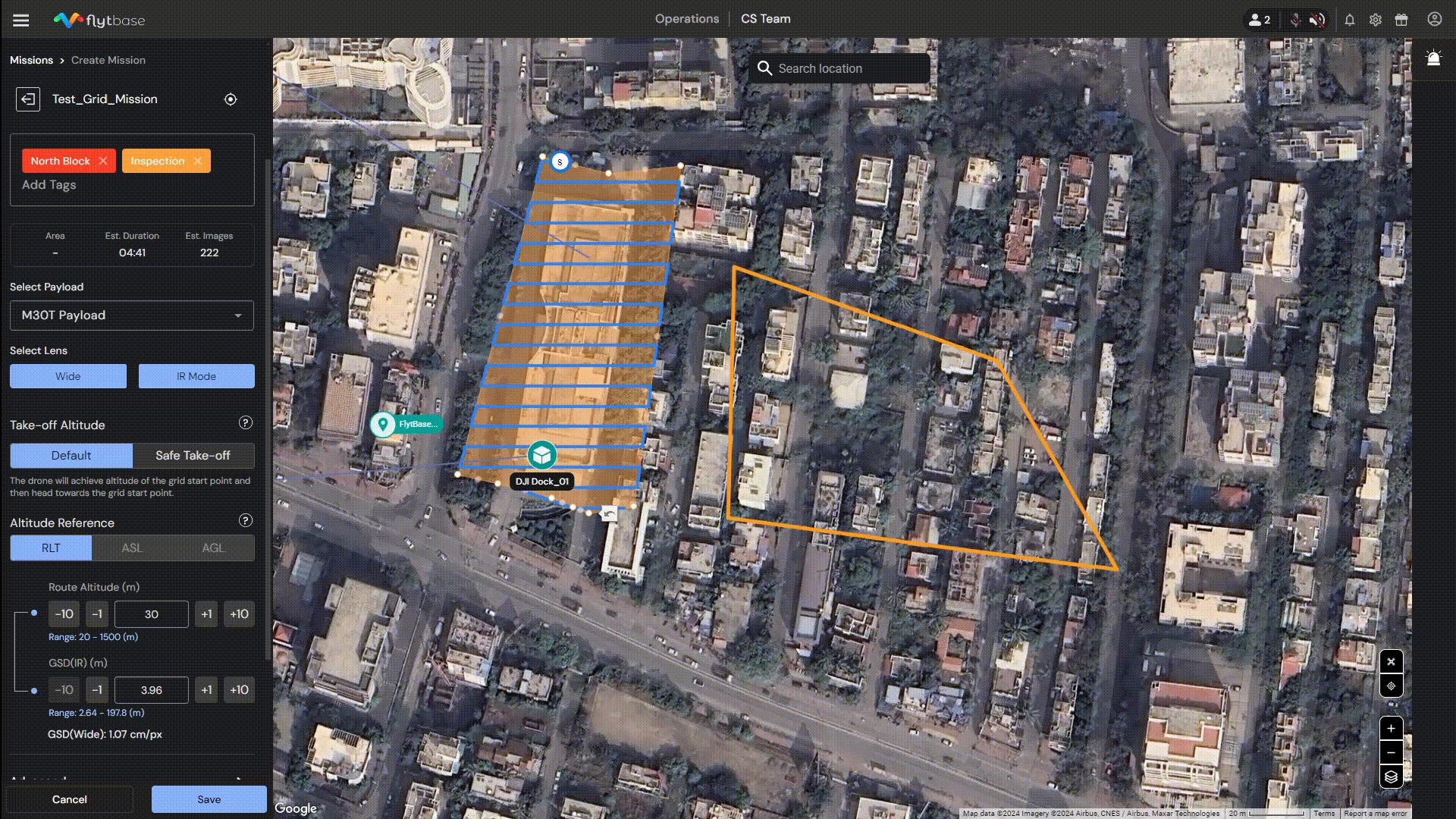
- Dans le cas de M30T Payload, vous pouvez sélectionner le capteur Wide-Angle, le capteur IR Mode, ou les deux. Lorsque les deux capteurs sont sélectionnés, les paramètres de GSD s’affichent sous l’onglet Route Altitude.
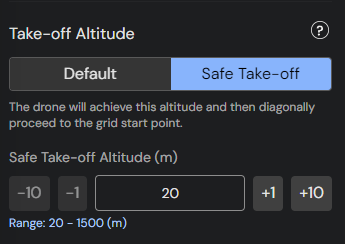
3. Take-off Altitude
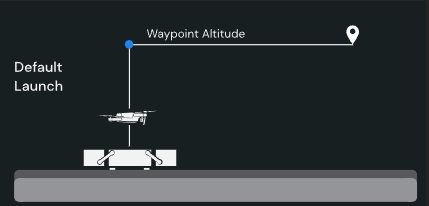
Le drone atteint une Take-off Altitude définie, puis commence la Grid Mission. Voici les différents modes possibles :
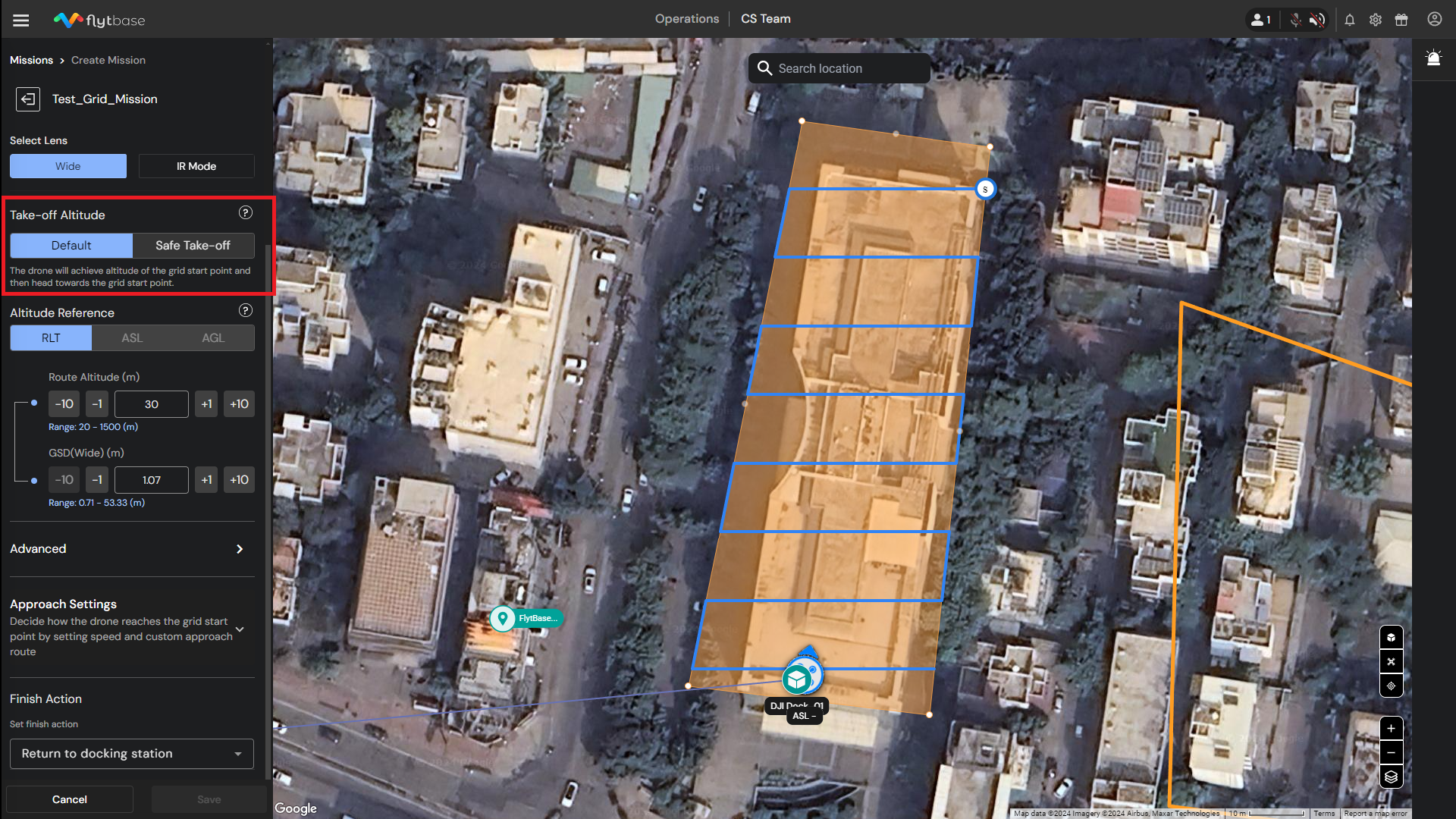
- Default Take-off Altitude : Le drone atteint l’altitude du Grid Start Point (c.-à-d. Route Altitude), puis se dirige vers celui-ci.
Info
Vous pouvez définir la Take-off Altitude pour un appareil en allant à Devices → Select Device → Settings → Drone Control. L’altitude définie pendant la planification de mission aura préséance sur les valeurs par défaut dans Settings.
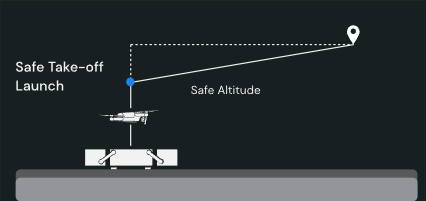
- Safe Take-off Altitude : Le drone atteint la « Safe Take-off Altitude », puis se dirige en diagonale vers le Grid Start Point.
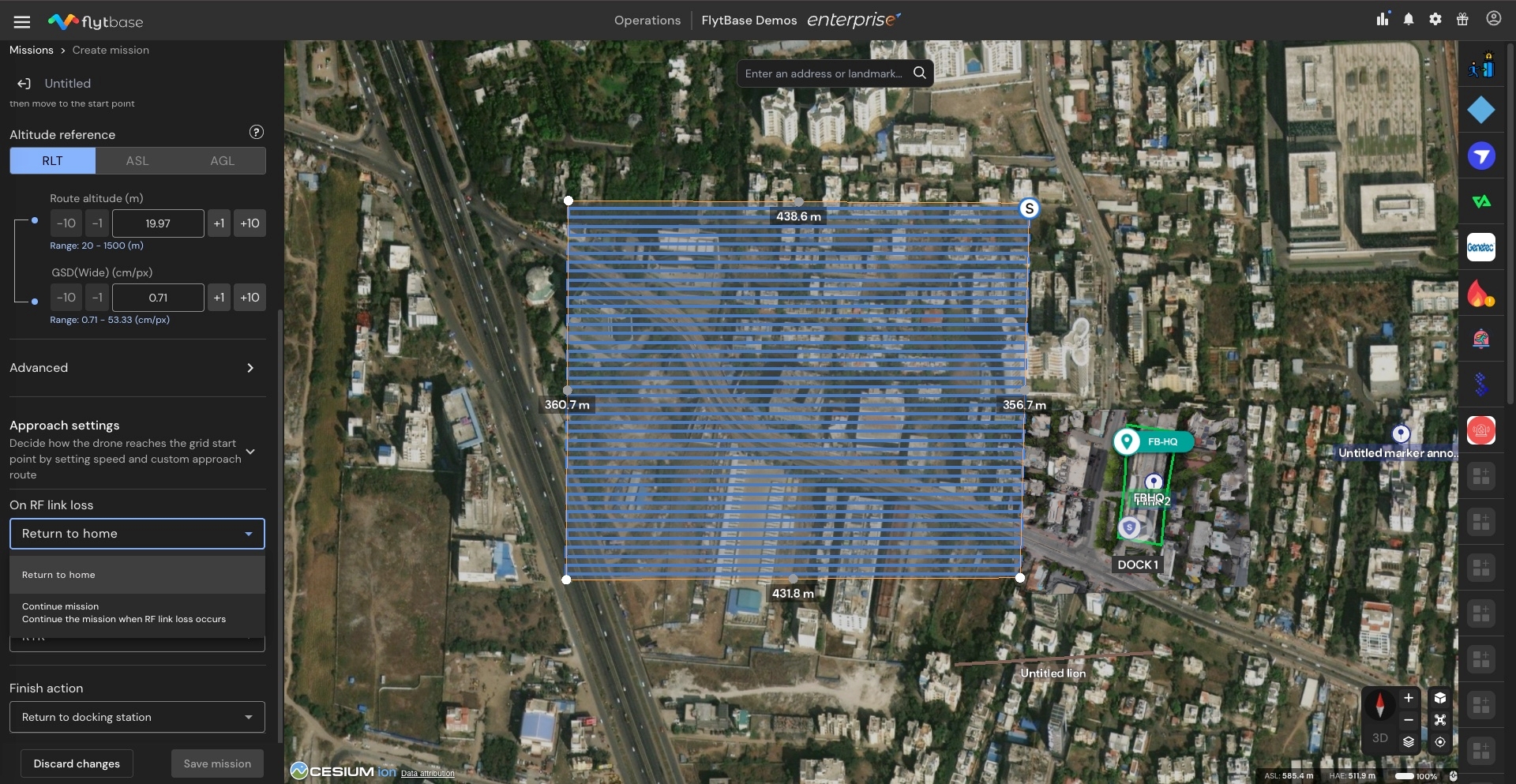
4. Référence d’altitude, altitude de route et GSD
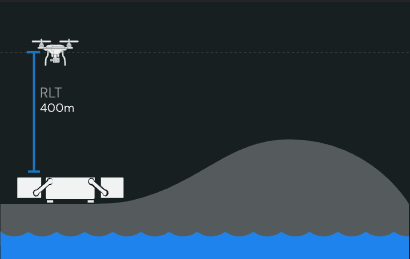
Il existe trois types d’Altitude Reference :
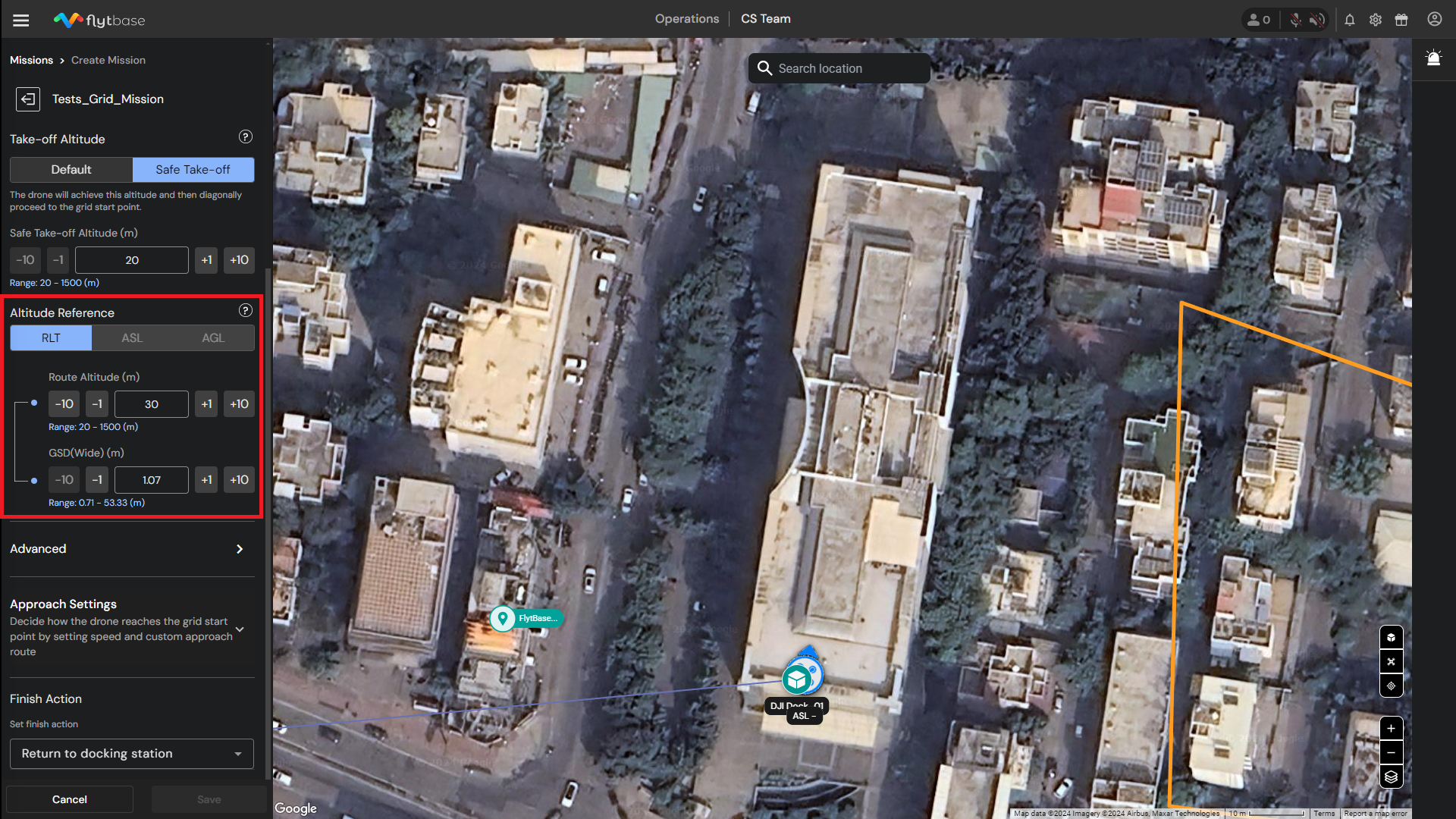
- Relative Take-off Point (RLT) : L’altitude relative est mesurée depuis le point de décollage. Une attention particulière est requise lors de la planification près du sol sur un terrain irrégulier. L’altitude de la route/des waypoints doit être ajustée selon la hauteur du terrain.
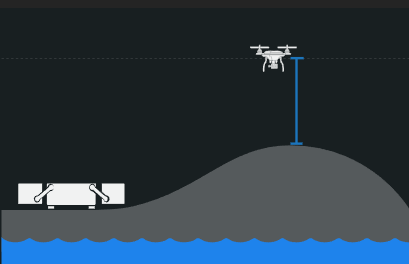
- Above Sea Level (ASL) : Altitude absolue du drone telle que représentée dans le modèle EGM . Utilisez ASL pour les missions qui exigent des mesures d’altitude globales, puisque la référence est le niveau de la mer.
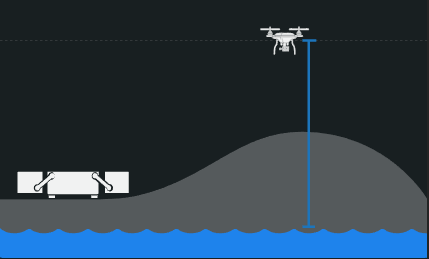
- Above Ground Level (AGL) : Altitude définie par rapport au niveau du sol. Des données fiables d’élévation du sol sont essentielles pour utiliser cette option de façon sécuritaire. Ce mode convient bien pour suivre automatiquement le terrain afin de maintenir une élévation spécifique par rapport au sol à tout point de la mission.
Info
Actuellement, seul le mode de configuration d’altitude RLT est actif dans le Dashboard.
- Après avoir sélectionné l’Altitude Reference, vous pouvez définir les paramètres suivants :
- Route Altitude : l’altitude à laquelle le drone exécutera la Grid Mission.
- GSD (Ground Sample Distance) : Le GSD correspond aux dimensions d’un pixel dans une image (cm/px), mesurées au sol. Il est calculé selon les propriétés du capteur du drone et la longueur focale, ainsi que l’altitude d’exécution de la mission.
Info
Le GSD est calculé à partir de la Route Altitude (et vice versa).
Tip
Vous pouvez aussi définir la Route Altitude via Settings → Flight Configuration. L’altitude définie pendant la planification de mission aura préséance sur la valeur par défaut spécifiée pour l’altitude de vol dans Flight Configuration.
Info
Le Ground Sampling Distance (GSD) aide à planifier efficacement les Grid Missions. Il permet de calculer l’altitude et la vitesse optimales afin d’obtenir la résolution d’image souhaitée, tout en assurant la couverture de la zone cible sans chevauchements ou écarts inutiles. Pour des mesures précises, des inspections détaillées et des calculs volumétriques exacts, un GSD plus faible est préférable, car il capture plus de détails.
5. Advanced Mission Settings
Vous pouvez configurer les paramètres suivants dans Advanced Settings :
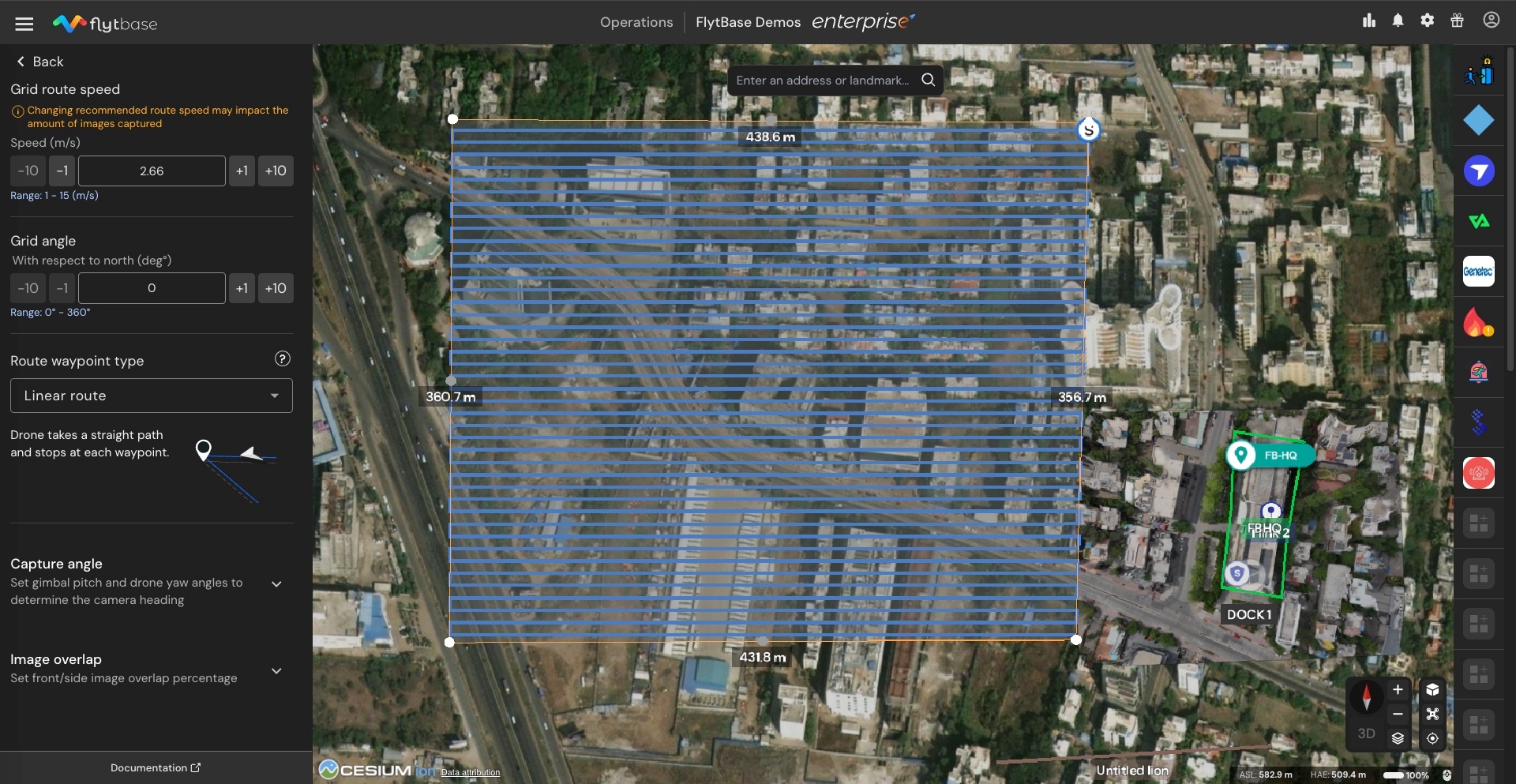
Grid Route Speed
Définissez la vitesse à laquelle le drone volera le long de la trajectoire de la grille.
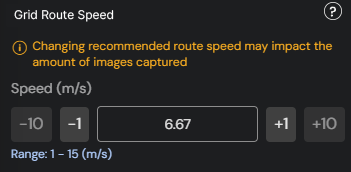
Info
La vitesse suggérée est calculée intelligemment en fonction de la Route Altitude et du GSD sélectionnés.
Warning
Modifier la Route Speed recommandée peut influencer le nombre d’images capturées pendant la mission.
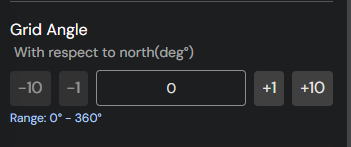
Grid Angle
Le Grid Angle peut être ajusté afin de changer l’orientation de la grille.
Route waypoint type
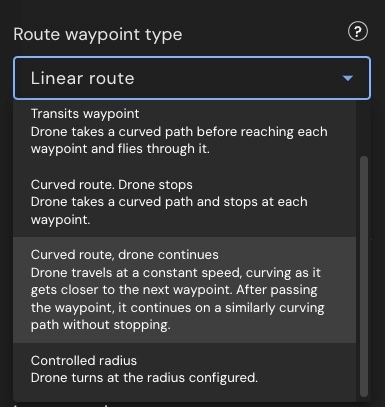
- Linear path : Le drone suit une trajectoire droite et s’arrête à chaque waypoint pour des tâches précises comme l’inspection ou la capture d’images.
- Transits waypoint : Le drone traverse chaque waypoint le long d’une trajectoire courbe sans s’arrêter, idéal pour des missions fluides et rapides.
- Curved route, stops at waypoint : Le drone suit une trajectoire courbe et s’arrête à chaque waypoint pour assurer des transitions fluides et une capture de données précise.
- Curved route, drone continues : Le drone se déplace à vitesse constante sur des trajectoires courbes sans s’arrêter, idéal pour des vols continus ou cinématiques.
- Controlled radius : Le drone tourne aux waypoints selon un rayon de virage défini afin d’obtenir des courbes fluides et constantes, utile en cartographie/arpentage. Le rayon des waypoints doit être spécifié ici.
Capture Angle
Les paramètres suivants peuvent être définis pour orienter la caméra dans la direction souhaitée :
- Gimbal Pitch : La caméra pointe vers le haut ou vers le bas selon la valeur.
- Drone Yaw : Définissez l’angle de lacet auquel le drone exécutera la mission. Le yaw peut être configuré relativement au Flight Path ou au North, selon les besoins.
Info
Le yaw du drone est verrouillé à l’angle défini par rapport à l’axe de référence (Flight Path ou North) et ne changera pas à mesure que la mission progresse.
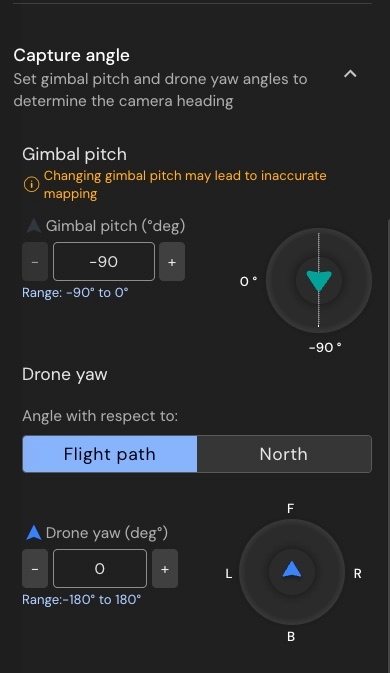
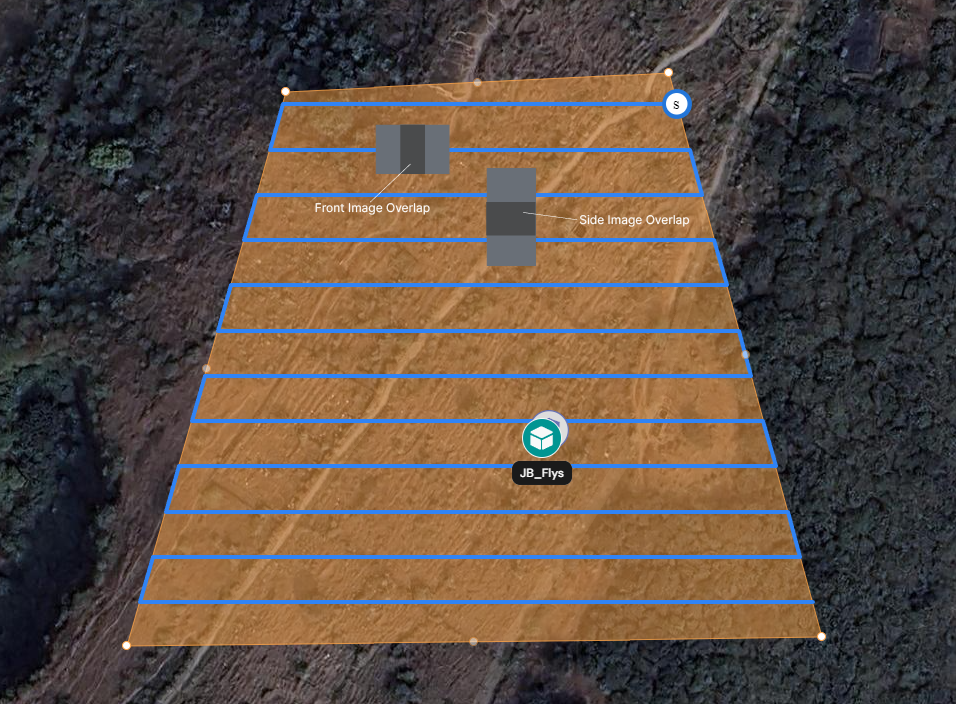
Image Overlap
Les paramètres d’Image Overlap influencent le pourcentage de région photographiée commun entre deux images consécutives prises le long d’une trajectoire, ou entre deux images prises sur des trajectoires adjacentes. Les changements à ces paramètres influencent la Route Speed et l’espacement de la grille. De plus, ils peuvent affecter le temps de traitement des images et la qualité du résultat après traitement.

- Front Overlap : Chevauchement entre deux images consécutives prises le long de la trajectoire de vol. Il s’agit du pourcentage de recouvrement entre l’avant d’une image et l’arrière de l’image précédente. Son objectif principal est d’assurer une couverture suffisante et une redondance pour produire des cartes ou modèles 3D précis et sans raccords visibles. Un Front Overlap élevé est essentiel en photogrammétrie, où plusieurs points de vue d’une même zone sont nécessaires pour assembler correctement les images.
- Side Overlap : Chevauchement entre des images capturées sur des trajectoires adjacentes. Il s’agit du pourcentage de recouvrement entre le côté d’une image et le côté d’une autre image d’une trajectoire parallèle. Comme le Front Overlap, le Side Overlap assure une couverture complète. Il aide à aligner et à assembler les images de différentes lignes de vol, crucial pour créer des cartes ou modèles 3D uniformes et de haute qualité sans trous.
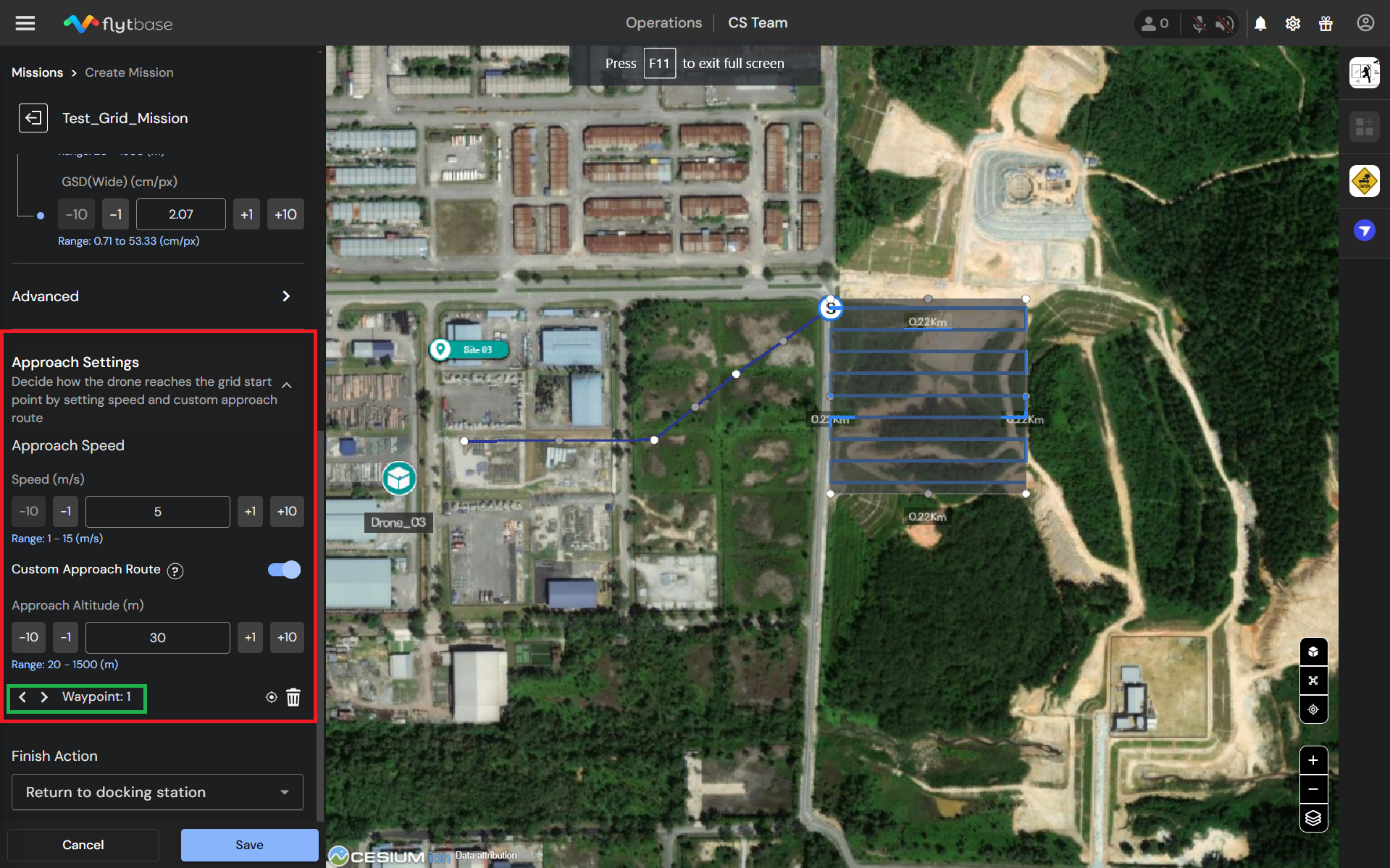
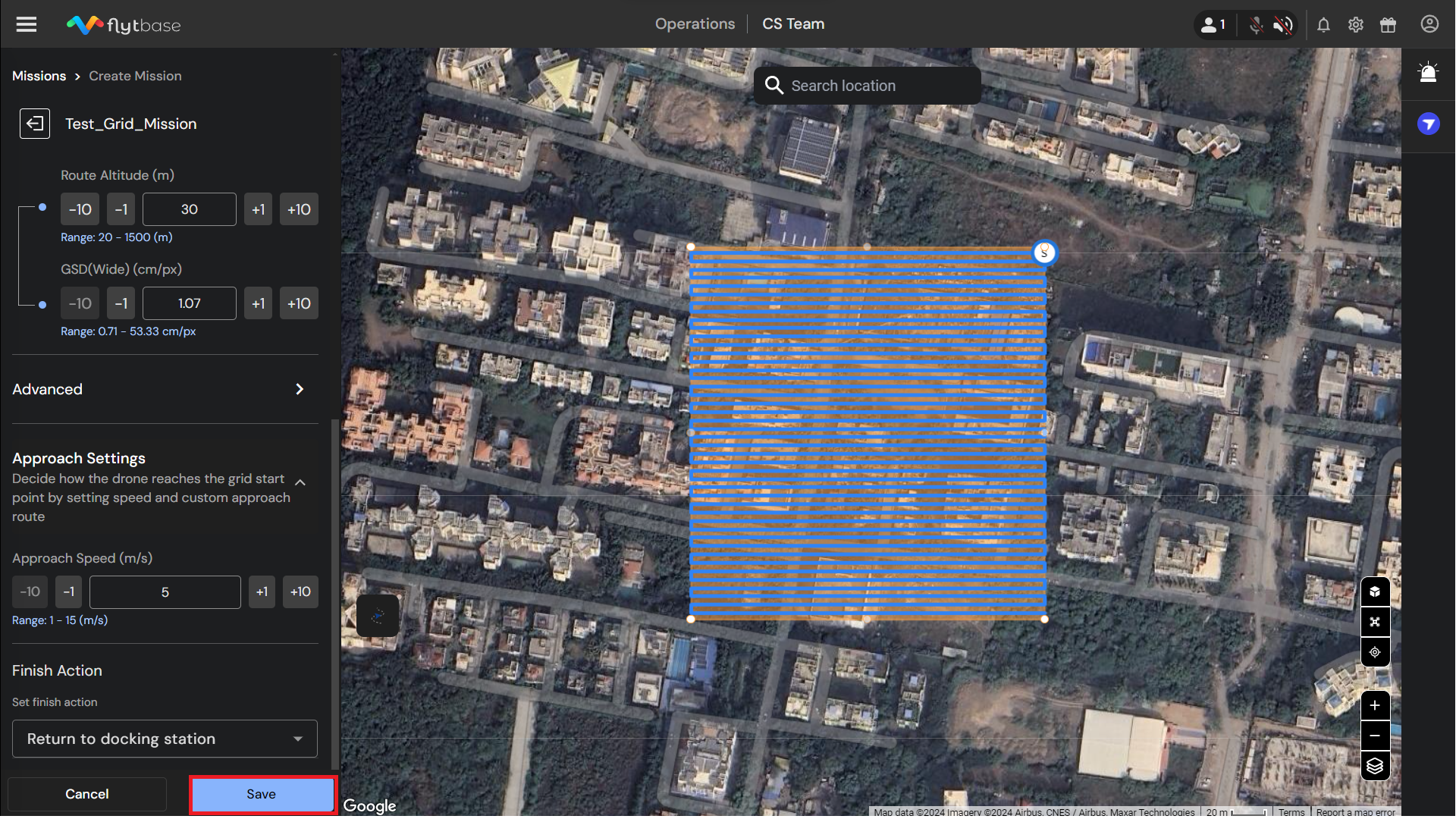
6. Approach Settings
Pour accroître la sécurité et l’efficacité, vous pouvez configurer le trajet d’approche et la vitesse menant au point de départ d’une Grid Mission. Cette fonctionnalité offre une flexibilité accrue pour concevoir et aligner la mission selon des exigences spécifiques. Les paramètres suivants peuvent être contrôlés :
- Approach Speed : Définissez la vitesse du drone lors de l’approche du point de départ de la mission.
- Custom Approach Route : Utilisez le bouton à bascule pour activer un trajet d’approche personnalisé. S’il n’est pas activé, le drone volera en ligne droite du dock vers le point de départ de la Grid Mission.
-
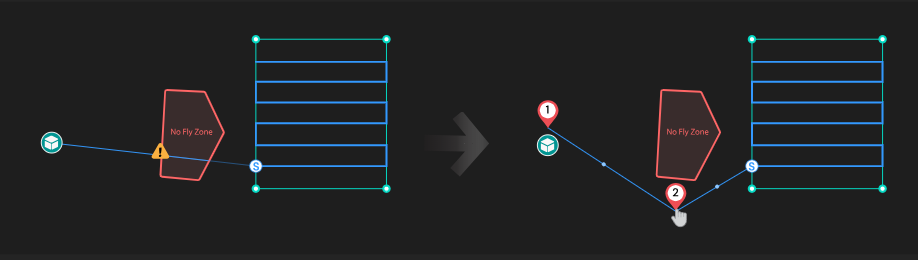
Setting an Approach Route :
- Cliquez sur la carte pour marquer le point de départ du trajet d’approche.
- Glissez-déposez des waypoints (milieux des segments de ligne droite) entre ce point de départ et le point de départ de la Grid Mission afin de créer le trajet d’approche souhaité.
-
Managing Waypoints :
- Les waypoints sont listés pour faciliter la navigation; utilisez les flèches gauche et droite pour voir tous les waypoints.
- Pour retirer un waypoint, cliquez sur l’icône.
7. RF Link Loss Condition
Ce paramètre définit le comportement du drone en cas de perte du lien RF. Vous pouvez le configurer pour continuer la mission ou lancer une procédure Return-to-Home (RTH).
8. Positioning Accuracy
Différentes options de Positioning Accuracy peuvent être configurées ici :
-
GNSS : S’appuie uniquement sur le positionnement satellite pour guider le drone. Convient aux opérations où une précision au centimètre n’est pas critique. Plage de précision :
- Horizontal : ± 1.5 m
- Vertical : ± 0.5 m
-
RTK : Bascule vers des corrections Real‑Time Kinematic pour une navigation ultra précise. Recommandé pour les applications nécessitant un maintien en position ultra précis, comme la cartographie au moyen de Grid Missions. Plage de précision :
- Horizontal : ± 0.1 m
- Vertical : ± 0.1 m
9. Finish Action
Choisissez l’action de fin lorsque le drone termine la Grid Mission. Voici les actions possibles :
- Return to Home (RTH) : Le drone retourne à la station d’accueil.
- Exit Mission and Hover : Le drone demeure en vol stationnaire au point de fin de la grille.
- Go to First Waypoint and Hover : Le drone se déplace au point de départ de la grille et demeure en vol stationnaire.
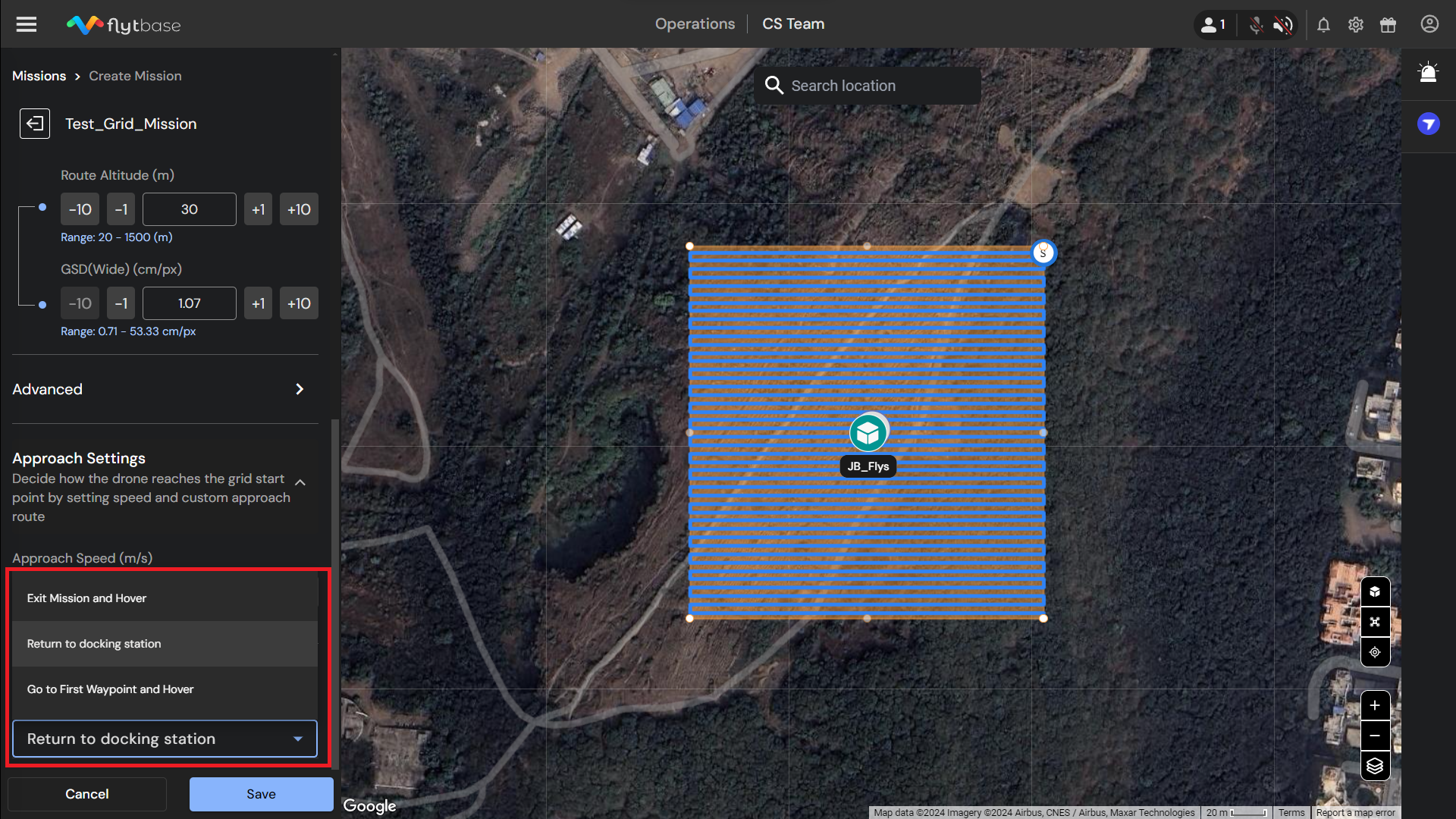
Une fois tous les paramètres définis, cliquez sur Save pour enregistrer la mission. Cette mission apparaîtra ensuite dans l’onglet Missions du dashboard FlytBase.
Pour en savoir plus sur la façon d’import a mission as a KML file, consultez la documentation suivante.